Caratteristiche meccaniche di un motore a induzione a diverse modalità, tensioni e frequenze
 Le caratteristiche meccaniche dei motori a induzione possono essere espresse come n = f (M) o n=e (I). Tuttavia, le caratteristiche meccaniche dei motori asincroni sono spesso espresse sotto forma di dipendenza M = f(S), dove C — scorrimento, S = (nc-n) / nc, dove ns — velocità sincrona.
Le caratteristiche meccaniche dei motori a induzione possono essere espresse come n = f (M) o n=e (I). Tuttavia, le caratteristiche meccaniche dei motori asincroni sono spesso espresse sotto forma di dipendenza M = f(S), dove C — scorrimento, S = (nc-n) / nc, dove ns — velocità sincrona.
In pratica, per la costruzione grafica delle caratteristiche meccaniche viene utilizzata una formula semplificata chiamata formula di Kloss:

qui: Mk — valore di coppia critico (massimo). Questo valore del momento corrisponde allo scorrimento critico

dove λm = Mk/Mn
La formula di Kloss viene utilizzata per risolvere i problemi relativi all'azionamento elettrico eseguito utilizzando un motore a induzione. Utilizzando la formula di Kloss, è possibile costruire un grafico delle caratteristiche meccaniche in base ai dati del passaporto del motore a induzione. Per calcoli pratici, nella formula dovrebbe essere considerato solo il segno più quando si determina il momento critico prima della radice.
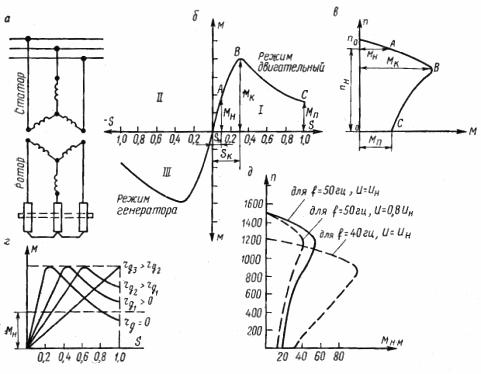
Riso. 1.Motore asincrono: a - diagramma schematico, b - caratteristica meccanica M = f (S) - naturale in modalità motore e generatore, c - caratteristica meccanica naturale n = f (M) in modalità motore, d - caratteristiche meccaniche di un reostato artificiale , e — caratteristiche meccaniche per diverse tensioni e frequenze.

Motore ad induzione a gabbia di scoiattolo
Come si può vedere dalla figura. 1, caratteristiche meccaniche di un motore asincrono situato nel I e III quadrante. La parte della curva nel I quadrante corrisponde ad un valore di scorrimento positivo e caratterizza la modalità di funzionamento del motore asincrono, e nel III quadrante la modalità del generatore. La modalità motore è di grande interesse pratico.
Il grafico delle caratteristiche meccaniche della modalità motore contiene tre punti caratteristici: A, B, C e può essere suddiviso condizionatamente in due sezioni: OB e BC (Fig. 1, c).
Il punto A corrisponde alla coppia nominale del motore ed è determinato dalla formula Mn = 9.55•103•(Strn /nn)
Questo momento corrisponde slittamento nominale, che per i motori con applicazione industriale generale ha un valore compreso tra 1 e 7%, ovvero Sn = 1 — 7%. Allo stesso tempo, i motori piccoli hanno più slittamento e quelli grandi meno.
I motori ad alto scorrimento destinati al carico d'urto hanno Сn~15%. Questi includono, ad esempio, i motori CA a serie singola.
Il punto C della caratteristica corrisponde al valore di coppia iniziale che si verifica sull'albero motore all'avviamento. Questo momento Mp è detto iniziale o iniziale. In questo caso, lo scorrimento è uguale all'unità e la velocità è zero. Coppia di avviamento è facilmente determinabile dai dati della tabella di riferimento, che riporta il rapporto tra la coppia di spunto e il nominale Mp/Mn.
L'entità della coppia di avviamento a valori costanti di tensione e frequenza di corrente dipende dalla resistenza attiva nel circuito del rotore. In questo caso, inizialmente all'aumentare della resistenza attiva, il valore della coppia di avviamento aumenta, raggiungendo il suo massimo quando la resistenza attiva del circuito del rotore è uguale alla resistenza induttiva totale del motore. Successivamente, all'aumentare della resistenza attiva del rotore, il valore della coppia iniziale diminuisce tendendo a zero nel limite.
Il punto C (Fig. 1, b e c) corrisponde a un momento massimo che può sviluppare il motore nell'intero intervallo di giri da n = 0 a n = ns... Questo momento è chiamato momento critico (o ribaltamento) Mk . Il momento critico corrisponde anche allo scorrimento critico Sk. Minore è il valore dello scorrimento critico Sk, nonché il valore dello scorrimento nominale Сn, maggiore è la rigidezza delle caratteristiche meccaniche.
I momenti iniziali e critici sono determinati da quelli nominali. Secondo GOST per le macchine elettriche con motore a gabbia di scoiattolo, deve essere soddisfatta la condizione Mn / Mn = 0,9 - 1,2, Mk / Mn = 1,65 - 2,5.
Si noti che il valore del momento critico non dipende dalla resistenza attiva del circuito del rotore, mentre lo scorrimento critico Сk è direttamente proporzionale a tale resistenza.Ciò significa che con un aumento della resistenza attiva del circuito del rotore, il valore del momento critico rimane invariato, ma il massimo della curva di coppia si sposta a valori di scorrimento crescenti (Fig. 1, d).
L'entità della coppia critica è direttamente proporzionale al quadrato della tensione applicata allo statore e inversamente proporzionale al quadrato della frequenza delle tensioni e alla frequenza della corrente nello statore.
Se, ad esempio, la tensione fornita al motore è pari all'85% del valore nominale, l'ampiezza della coppia critica sarà 0,852 = 0,7225 = 72,25% della coppia critica alla tensione nominale.
Il contrario si osserva quando si cambia la frequenza. Se, ad esempio, ad un motore progettato per funzionare con una frequenza di corrente di = 60 Hz, una corrente di alimentazione con una frequenza di = 50 Hz, allora il momento critico arriverà a (60/50)2=1,44 volte maggiore di il valore ufficiale la sua frequenza (Fig. 1, e).
Il momento critico caratterizza la capacità di sovraccarico istantaneo del motore, cioè indica quale momento (in pochi secondi) di sovraccarico il motore è in grado di sopportare senza conseguenze dannose.

La sezione della caratteristica meccanica da zero al valore massimo (critico) (vedi Fig. 1, biv) è chiamata la parte stabile della caratteristica e la sezione BC (Fig. 1, c) - la parte instabile.
Questa divisione è spiegata dal fatto che sulla parte crescente delle caratteristiche OF con scorrimento crescente, ad es. al diminuire della velocità, la coppia sviluppata dal motore aumenta.Ciò significa che all'aumentare del carico, ovvero all'aumentare della coppia frenante, la velocità di rotazione del motore diminuisce e la coppia da esso aumentata aumenta. Quando il carico diminuisce, al contrario, la velocità aumenta e la coppia diminuisce. Quando il carico cambia nell'intervallo della parte stabile della caratteristica, la velocità di rotazione e la coppia del motore cambiano.
Il motore non può sviluppare più della coppia critica, e se la coppia frenante è maggiore, il motore deve inevitabilmente fermarsi. Si verifica un ribaltamento del motore, come si suol dire.
Una caratteristica meccanica a U e I costanti e l'assenza di resistenza aggiuntiva nel circuito del rotore è chiamata caratteristica naturale (caratteristica di un motore a induzione a gabbia di scoiattolo con rotore avvolto senza resistenza aggiuntiva nel circuito del rotore). Le caratteristiche artificiali o reostatiche sono chiamate quelle che corrispondono alla resistenza aggiuntiva nel circuito del rotore.
Tutti i valori di coppia di avviamento sono diversi e dipendono dalla resistenza attiva del circuito del rotore. Cursori di diversa grandezza corrispondono alla stessa coppia nominale Mn. All'aumentare della resistenza del circuito del rotore, lo scorrimento aumenta e quindi la velocità del motore diminuisce.
A causa dell'inclusione della resistenza attiva nel circuito del rotore, la caratteristica meccanica nella parte stabile viene allungata nella direzione dell'aumento dello scorrimento, proporzionale alla resistenza.Ciò significa che la velocità del motore inizia a variare in modo significativo a seconda del carico sull'albero e la caratteristica dura diventa morbida.