La selezione di un motore elettrico asincrono per il funzionamento nella modalità di frenatura dinamica mediante autoeccitazione
 Motore elettrico asincrono con rotore avvolto con lo schema di controllo più semplice: l'inclusione della resistenza nel circuito del rotore ha proprietà di controllo estremamente basse. Pertanto, prima della disponibilità dei convertitori di frequenza sul mercato, sono stati sviluppati vari schemi per ottenere una velocità ridotta in modalità step-down.
Motore elettrico asincrono con rotore avvolto con lo schema di controllo più semplice: l'inclusione della resistenza nel circuito del rotore ha proprietà di controllo estremamente basse. Pertanto, prima della disponibilità dei convertitori di frequenza sul mercato, sono stati sviluppati vari schemi per ottenere una velocità ridotta in modalità step-down.
In realtà non ce ne sono molti. All'estero si diffuse l'uso di una macchina elettrica aggiuntiva, un freno a vortice montato sullo stesso albero del motore principale. Lo schema consente di ottenere caratteristiche meccaniche sufficientemente rigide durante l'abbassamento del carico, ma un tale azionamento elettrico ha caratteristiche energetiche estremamente basse (l'energia frenante viene rilasciata nel freno a vortice). Inoltre il freno a vortice ha un costo piuttosto elevato e complica notevolmente il layout della parte meccanica.
Pertanto, al fine di ottenere la velocità di atterraggio nei meccanismi di sollevamento basati su un motore asincrono con rotore di fase presso lo stabilimento Dynamo alla fine degli anni '70, un team di progettazione guidato da E.M. Pevzner ha introdotto la frenata dinamica autoeccitata.
Tale azionamento elettrico è ampiamente utilizzato nelle gru domestiche (pannelli di tipo TSD, TSDI, KSDB per gru a ponte, a cavalletto e a cavalletto, pannelli di controllo per gru a torre KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Parliamo quindi di decine di migliaia di gru in funzione.
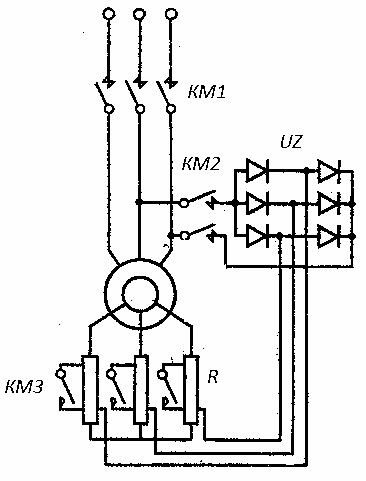
Riso. 1. Schema di inclusione di un motore asincrono in modalità di frenatura dinamica mediante autoeccitazione
Il principio della frenatura dinamica con autoeccitazione è il seguente:
Il circuito del rotore include raddrizzatore trifase UZ (figura 1). Il motore elettrico è disconnesso dalla rete tramite il contattore KM1. La tensione raddrizzata è collegata all'avvolgimento dello statore attraverso il contattore KM2. I contatti del contattore KM3 sono chiusi. Quando il freno viene rilasciato (non mostrato nel diagramma), l'albero motore inizia a ruotare sotto l'azione del peso in caduta.
Un EMF viene indotto nell'avvolgimento del rotore, sotto l'influenza del quale una corrente inizia a fluire nel circuito rotore-statore. Il motore sviluppa la coppia frenante, il carico viene abbassato a velocità costante. Il valore della velocità è determinato dal valore della resistenza del circuito del rotore. Maggiore è la resistenza, maggiore è la velocità di discesa. Per aumentare la velocità, il contattore KM3 viene disattivato.
Nella modalità di frenatura dinamica ad autoeccitazione, l'azionamento elettrico consuma energia dalla rete solo per alimentare lo spintore idraulico del freno e l'apparecchiatura del relè-contattore. A titolo di esempio, Fig. 7 mostra le caratteristiche meccaniche di un azionamento elettrico con quadro TSD.
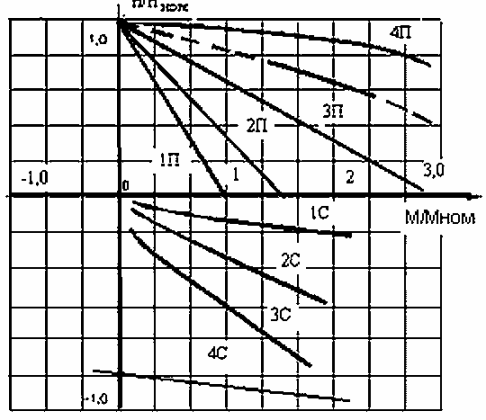
Riso. 2. Caratteristiche meccaniche dell'azionamento elettrico del meccanismo di sollevamento con il pannello TSD
Le caratteristiche di frenatura dinamica sono designate come 1C, 2C, 3C. Si può vedere che le caratteristiche hanno una durezza sufficiente. La regolazione della velocità viene eseguita nell'intervallo 1: 8, che nella maggior parte dei casi è sufficiente per rubinetti di massa.
La condizione per l'autoeccitazione del motore elettrico è:
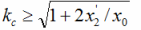
Dove x '2- resistenza induttiva dell'avvolgimento del rotore, Ohm; хо- resistenza induttiva del circuito di magnetizzazione. Om
Dove ks — coefficiente dello schema
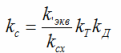
kd — coefficiente di riduzione della corrente del rotore alla corrente dello statore; kcx — coefficiente del circuito di correzione, per un circuito a ponte trifase kx = 0,85; kt è il coefficiente di trasformazione del motore da statore a rotore
Il coefficiente kd dipende dallo schema di collegamento degli avvolgimenti dello statore, che sono collegati a una stella nei motori dei rubinetti domestici a una tensione di rete di 380 V.
Il coefficiente kt dipende dal coefficiente di trasformazione, cioè del rapporto tra la tensione dello statore e la tensione del rotore, che dipende dal tipo di motore. Ad esempio, per alcuni motori elettrici della serie MT e 4MT, viene tabulato il valore ed i relativi parametri. 1.
Tabella 1.
Tipo motore elettrico potenza, kWt Tensione rotore, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512 -6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
La condizione кс ≥ √(1 + 2х '2/хо) viene eseguita per i motori di tipo MTN412-6, 4MTN225L6, che possono essere definiti "eccitati". Tali motori elettrici entrano nella modalità di autoeccitazione senza prendere ulteriori decisioni sul circuito. Tuttavia, nei dispositivi completi a bassa tensione (quadri a bassa tensione o pannelli di controllo) progettati per funzionare insieme a tali motori, viene fornita una piccola eccitazione iniziale per un funzionamento affidabile.
L'eccitazione iniziale viene effettuata passando una costante, la cosiddetta Un piccolo valore di "corrente di alimentazione" (di solito non superiore al 10% della corrente nominale del motore) da un raddrizzatore a semionda. Per i motori eccitati, in ogni caso, questo è sufficiente per una transizione affidabile alla modalità di frenatura dinamica autoeccitata.
I motori elettrici MTN512-6, 4MTN280M6, per i quali la condizione кс ≥ √(1 + 2х '2/хо) non è soddisfatta, sono "non eccitati". Ciò non significa che tali motori non possano funzionare in modalità di frenatura dinamica con autoeccitazione, ma il valore della corrente aggiuntiva richiesta per loro raggiunge il 50% della corrente nominale dello statore.Ciò richiede l'uso di speciali NKU (quadri di controllo) per motori elettrici non eccitati. …
Il motore elettrico tipo 4MTN280L10 con кс = √(1 + 2х '2/хо) è al limite dell'autoeccitazione e qualsiasi variazione casuale dei parametri può violare la condizione di autoeccitazione. Pertanto, un tale motore può anche essere classificato come non eccitabile.
I parametri principali che influenzano la capacità del motore elettrico di autoeccitarsi è la tensione nominale del rotore E2nom. Il valore critico di E2nom, al quale l'autoeccitazione non si verifica senza una grande corrente di alimentazione, dovrebbe essere preso come 300 V.
Questa caratteristica della modalità di frenatura dinamica di autoeccitazione è stata presa in considerazione dallo stabilimento Dynamo e da Sibelektromotor PO durante lo sviluppo di una serie di motori elettrici per gru 4MT all'inizio degli anni '80.
In particolare il valore E2nom per alcuni motori elettrici è stato ridotto rispetto alla precedente serie MT per rendere i motori eccitabili.
Ad esempio, per il motore elettrico 4MTN225L6, ampiamente utilizzato nell'azionamento elettrico delle gru a torre, E2nom è stato ridotto rispetto al precedente motore della serie MTN512-6 da 340 a 290 V, il che ha reso il motore autoeccitato. Successivamente, OJSC "Sibelectromotor" ha avviato la produzione del motore elettrico 4MTM225L6 con gli stessi parametri.
Nel corso del tempo, altri produttori hanno iniziato a produrre motori elettrici con uno scopo simile.
L'impianto di costruzione di gru Rzhevsky produce il motore elettrico MKAF225L6, la Siberian Electrotechnical Company produce il motore elettrico 4MTM225L6 PND.Nonostante l'aspetto diverso dal prototipo legato alle capacità tecnologiche di ciascuno dei produttori, tutti questi motori elettrici hanno gli stessi parametri elettrici e dimensioni di installazione e sono completamente intercambiabili.
La differenza nei nomi dei motori consente all'utente di effettuare una scelta informata di uno o di un altro produttore, guidato dalle proprie preferenze, prezzo, tempi di consegna, ecc. E allo stesso tempo, assicurati assolutamente che la sostituzione di un motore elettrico di un produttore di rubinetti con un motore elettrico di un altro produttore non provochi un malfunzionamento del rubinetto o un incidente.
Tuttavia, nell'ultimo decennio, sul mercato interno sono apparsi motori elettrici di vari produttori, il cui marchio riproduce esattamente il marchio del motore elettrico "originale" prodotto da JSC "Sibelectromotor". Si può presumere che l'origine dei motori elettrici sia collegata al grande vicino orientale del nostro paese. Il loro prezzo è leggermente inferiore a quello dei produttori tradizionali, quindi è comprensibile l'interesse per loro da parte delle forniture delle imprese.
Pertanto, ordinando un motore elettrico da installare su una gru fabbricata o sostituendo un motore elettrico danneggiato su una gru con uno funzionante, è possibile ottenere un motore elettrico di un produttore sconosciuto, con un E2nom diverso dal motore elettrico prototipo.
La situazione ricorda in qualche modo i primi anni '90, quando diversi gruppi pop con lo stesso nome giravano il paese contemporaneamente.
Ricordiamo ancora una volta che il rapporto E2nom / I2nom è il parametro più importante di un motore a rotore avvolto, che influisce sulla scelta delle resistenze di avviamento, dell'equipaggiamento relè-contattore e, come accennato in precedenza, sulla condizione di autoeccitazione del motore elettrico.
Spesso, tuttavia, non ci sono dati sul rotore sulle targhette dei motori clonati. Ecco un esempio:
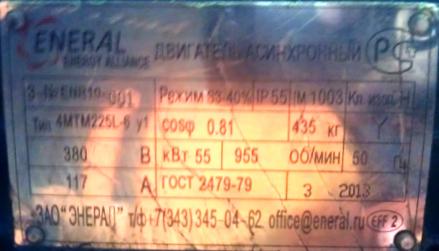
Riso. 3. Targhetta del motore asincrono della gru del rotore
A proposito, questo motore elettrico aveva il valore «corretto» E2nom, solo ora doveva essere determinato empiricamente.
Nei cataloghi di altri produttori per il motore elettrico 4MTM225L6 è indicato il valore E2nom = 340 V, ovvero il motore eccitato divenne uno non eccitato. La conseguenza dell'utilizzo di un tale motore elettrico come parte di un azionamento elettrico con frenatura dinamica con autoeccitazione è una caduta del carico e la separazione del motore elettrico con distruzione meccanica del rotore e degli avvolgimenti dello statore.
È esattamente questa immagine che l'autore ha osservato di recente in una delle più antiche imprese russe di costruzione di macchine, dove è stata consegnata una nuova gru a ponte con un motore elettrico clonato del tipo 4MTM225L6 con E2n = 340 V. Solo per fortuna, le persone non l'hanno fatto soffrire. Inoltre, il proprietario della gru ripristina il motore tre (!) volte dopo la schivata.
Un altro produttore di motori elettrici clone, apparentemente ripetutamente vittima di incidenti simili, ora produce due motori elettrici con lo stesso marchio (!). Uno con E2nom = 340 V, l'altro con E2nom = 264 V è riportato a catalogo con una nota: "per rubinetti tipo KB", cioè gru a torre.
Tale motore è infatti più diffuso sulle gru a torre, ma è installato anche sulle gru a ponte. Quindi puoi ascoltare il dialogo tra il fornitore e il cliente: “Per quale gru hai bisogno di un motore? Per la pavimentazione. Quindi prendi questo (E2nom = 340 V). » E nell'azionamento dei paranchi elettrici è presente un pannello di controllo con frenatura dinamica autoeccitata. Il risultato è descritto sopra.
Allo stesso tempo, nessuno sta dicendo che questi motori elettrici sono difettosi o inaffidabili e non possono essere utilizzati sulle gru. Più scelte sul mercato, meglio è. Come si suol dire, ci sono motori più buoni e diversi. È solo che il loro marchio inganna il consumatore, il che può essere irto di conseguenze pericolose.
Per utilizzare un motore elettrico con parametri del rotore diversi dal prototipo, è necessario:
-
Misurare E2nom quando il circuito del rotore è aperto e l'avvolgimento dello statore è connesso alla rete;
-
Sulla base delle misurazioni E2nom, calcola, seleziona e ordina i resistori di zavorra;
-
Scegli dal catalogo un quadro elettrico per motori elettrici non eccitati e ordinalo.
Oppure puoi semplicemente chiedere il valore di E2nom prima di ordinare un motore che attrae con il suo prezzo e concordarlo specificamente nel contratto. Tuttavia, ciò non preclude la misurazione di E2nom durante il controllo di ingresso del motore ordinato.
Riassumendo quanto sopra, possiamo trarre le seguenti conclusioni:
-
Nell'azionamento elettrico dei rubinetti domestici basati su motori elettrici a rotore di fase, è ampiamente utilizzata la frenatura dinamica autoeccitata. Decine di migliaia di tali azionamenti elettrici sono in funzione. Sono ancora in fase di rilascio.
-
Per funzionare in modalità di frenatura dinamica autoeccitata, il motore elettrico deve avere un certo rapporto E2nom / I2nom.
-
La condizione principale per l'autoeccitazione di un motore elettrico con rotore avvolto è il valore di E2nom ≤ 300 V.
-
L'utilizzo di motori elettrici con E2nom> 300 V con quadri predisposti per motori elettrici eccitati può causare la caduta del carico e la distruzione del motore elettrico.