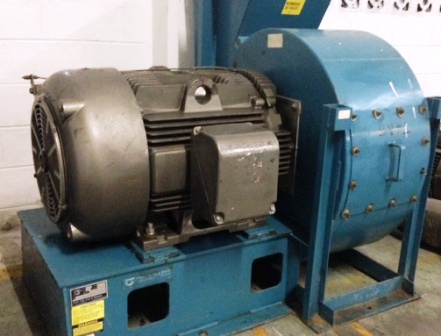
Selezione di motori elettrici per apparecchiature con diversi tipi di carico e modalità operative
 La corretta selezione dei motori elettrici per i meccanismi di produzione garantisce il loro funzionamento continuo e affidabile per tutta la vita utile standard. Questo è un processo molto importante in cui devono essere considerati molti fattori e criteri diversi. Uno dei fattori più importanti è la considerazione della natura e del tipo di carico.
La corretta selezione dei motori elettrici per i meccanismi di produzione garantisce il loro funzionamento continuo e affidabile per tutta la vita utile standard. Questo è un processo molto importante in cui devono essere considerati molti fattori e criteri diversi. Uno dei fattori più importanti è la considerazione della natura e del tipo di carico.
Ecco tutti i criteri da considerare nella scelta: Come scegliere il motore elettrico giusto
Quando si scelgono motori elettrici per varie macchine, impianti e macchine, è necessario tenere conto dei diversi tipi di carico, del tipo di caratteristiche meccaniche, della natura e della durata dei cicli di lavoro di questi meccanismi.
Sapendo come cambierà il carico sull'albero del motore elettrico selezionato, è possibile determinare con precisione come cambieranno le perdite di potenza durante il funzionamento e, grazie a ciò, scegliere un motore elettrico che, lavorando a un dato carico, non si surriscaldi . La temperatura massima di riscaldamento dell'isolamento del motore elettrico non supererà il valore consentito durante l'intero ciclo di lavoro.
La selezione errata dei motori elettrici dei meccanismi di produzione porta all'interruzione dei processi di produzione e porta a perdite di prodotti fabbricati e costi aggiuntivi per l'elettricità.
Le apparecchiature elettriche con motori elettrici devono soddisfare pienamente i requisiti del processo tecnologico.
La scelta di una delle tipologie di motori elettrici a catalogo è considerata corretta se sono soddisfatte le seguenti condizioni:
-
la corrispondenza più completa del motore elettrico con la macchina funzionante (meccanismo di azionamento) in termini di proprietà meccaniche. Ciò significa che il motore elettrico deve avere una caratteristica meccanica tale da poter fornire all'azionamento i necessari valori di velocità e accelerazione in stato stazionario e transitorio;
-
massimo utilizzo della potenza del motore elettrico in tutte le modalità operative. La temperatura di tutte le parti attive del motore elettrico nelle modalità operative più severe dovrebbe essere il più vicino possibile alla temperatura di riscaldamento consentita, ma non superarla;
-
compatibilità del motore elettrico con l'azionamento e le condizioni ambientali in termini di progettazione;
-
conformità del motore elettrico ai parametri dell'alimentazione.
Per scegliere un motore elettrico sono necessari i seguenti dati:
-
tipo e nome del meccanismo di azionamento;
-
potenza massima all'albero, se il modo di funzionamento è continuo e il carico è costante, e negli altri casi, grafici delle variazioni di potenza o momento resistente dell'albero in funzione del tempo;
-
frequenza di rotazione (o intervallo di frequenza di rotazione) dell'albero motore;
-
modalità di articolazione del meccanismo di comando con l'albero del motore elettrico (in presenza di trasmissioni cinematiche sono indicati il tipo di trasmissione ed il rapporto di trasmissione);
-
la quantità di coppia di avviamento che il motore elettrico deve fornire all'albero motore;
-
limiti di regolazione della velocità (valori superiore e inferiore e corrispondenti valori di potenza e coppia);
-
qualità richiesta (uniformità, gradazione) del controllo della velocità;
-
frequenza di attivazione dell'azionamento entro un'ora;
-
caratteristiche dell'ambiente esterno.
La selezione di un motore elettrico basata sulla considerazione di tutte le condizioni e dei dati nominali viene effettuata secondo i cataloghi.

Le possibili modalità di funzionamento degli azionamenti elettrici si distinguono per un'enorme varietà in termini di natura e durata dei cicli, valori di carico, condizioni di raffreddamento, rapporto tra perdite di avviamento e silenziosità di funzionamento, ecc., quindi la produzione di motori elettrici per ogni delle possibili modalità di funzionamento di un motore elettrico non ha alcun senso pratico.
Sulla base dell'analisi delle modalità reali, viene identificata una classe speciale di modalità: le modalità nominali, per le quali i motori seriali sono progettati e fabbricati.
I dati contenuti nel passaporto di una macchina elettrica si riferiscono a una certa modalità nominale e sono chiamati dati nominali di una macchina elettrica.
I produttori garantiscono che quando il motore elettrico funziona in modalità nominale al carico nominale, viene completamente utilizzato termicamente.
L'attuale GOST fornisce 8 modalità nominali, che secondo la classificazione internazionale hanno simboli S1 - S8.
Servizio continuo S1 — funzionamento della macchina a carico costante per un tempo sufficientemente lungo da raggiungere una temperatura costante di tutte le sue parti.
Servizio di breve durata S2 — funzionamento della macchina a carico costante per un tempo insufficiente affinché tutte le parti della macchina raggiungano la temperatura impostata, seguito dall'arresto della macchina per un tempo sufficiente a raffreddare la macchina a una temperatura non superiore a 2 °C dalla temperatura ambiente. Per il lavoro a breve termine, la durata del periodo di lavoro è di 15, 30, 60, 90 minuti.
Servizio intermittente S3 — una sequenza di cicli di lavoro identici, ciascuno dei quali include il tempo di funzionamento a carico continuo durante il quale la macchina non si riscalda alla temperatura impostata e il tempo di parcheggio durante il quale la macchina non si raffredda alla temperatura ambiente.
In questa modalità, il ciclo di lavoro è tale che la corrente di spunto non influisce in modo significativo sull'aumento della temperatura. Il tempo di ciclo è insufficiente per raggiungere l'equilibrio termico e non supera i 10 minuti. La modalità è caratterizzata dal valore della durata dell'inserimento in percentuale:
I motori prodotti dall'industria per questa modalità di funzionamento sono caratterizzati da un ciclo di lavoro (PV), definito dalla durata di un ciclo di lavoro
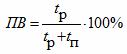
dove tp è il tempo di funzionamento del motore; tp - tempo di pausa.
Valori standardizzati della durata dell'inclusione: 15, 25, 40, 60% o valori relativi della durata del periodo lavorativo: 0,15; 0,25; 0,40; 0,60. Per la modalità S3, i dati nominali corrispondono solo a un determinato ciclo di lavoro e si riferiscono al periodo di lavoro.
Le modalità S1 - S3 sono attualmente le principali, i cui dati nominali sono inclusi dalle fabbriche locali di veicoli elettrici nei cataloghi e nel passaporto della macchina.
Per saperne di più qui: Modalità di funzionamento dei motori elettrici
Per una scelta ragionevole del motore in termini di potenza, è necessario sapere come cambia il carico sull'albero motore nel tempo, il che a sua volta consente di valutare la natura della variazione delle perdite di potenza.
Inoltre, è necessario stabilire come procede il processo di riscaldamento del motore a seguito del rilascio di perdite di energia in esso. Questo approccio consente di scegliere il motore in modo tale che la temperatura massima dell'isolamento dell'avvolgimento non superi il valore consentito. Questa condizione è una delle principali per garantire il funzionamento affidabile del motore per tutta la sua vita utile.
La scelta della potenza del motore elettrico deve essere fatta in funzione della natura dei carichi sulla macchina operatrice. Questo carattere è valutato per due motivi:
-
secondo la modalità nominale di funzionamento;
-
attraverso variazioni della quantità di energia consumata.
La potenza del motore deve soddisfare tre condizioni:
-
normale riscaldamento durante il funzionamento;
-
sufficiente capacità di sovraccarico;
-
coppia di avviamento sufficiente.
La scelta dei motori elettrici con il cosiddettoLa "riserva di carica", basata sul massimo carico possibile secondo il programma, porta al sottoutilizzo del motore elettrico, e quindi all'aumento dei costi di capitale e dei costi operativi a causa della riduzione dei fattori di potenza e dell'efficienza. Un aumento eccessivo della potenza del motore può anche portare a scatti durante l'accelerazione.
Se il motore elettrico deve funzionare a lungo con un carico costante o leggermente variabile, determinarne la potenza non è difficile e viene eseguito secondo le formule. È molto più difficile scegliere la potenza dei motori elettrici in altre modalità di funzionamento.

Il carico a breve termine è caratterizzato dal fatto che i periodi di inclusione sono brevi e le pause sono sufficienti per il completo raffreddamento del motore elettrico. In questo caso si presume che il carico sul motore elettrico durante i periodi di commutazione rimanga costante o quasi costante.
Affinché il motore elettrico possa essere utilizzato correttamente per il riscaldamento in questa modalità, è necessario sceglierlo in modo che la sua potenza continua (indicata nei cataloghi) sia inferiore alla potenza corrispondente al carico di breve durata, ad es. il motore elettrico ha un sovraccarico termico durante i periodi del suo funzionamento a breve termine...
Se i periodi di funzionamento del motore elettrico sono significativamente inferiori al tempo necessario per il suo completo riscaldamento, ma le pause tra i periodi di accensione sono significativamente più brevi del tempo di completo raffreddamento, si verifica un carico ripetuto a breve termine.
Calcolo della potenza e selezione del motore per il funzionamento continuo
Con un carico sull'albero costante o leggermente variabile, la potenza del motore dovrebbe superare solo leggermente la potenza del carico.In questo caso, la condizione deve essere soddisfatta
Pn ≥ P,
dove Pn è la potenza nominale del motore; P — potenza di carico. La scelta di un motore si riduce a sceglierlo dal catalogo.
Selezione della potenza del motore per il funzionamento continuo. Se la coppia e la potenza del meccanismo di produzione non cambiano, è necessario selezionare un motore con una potenza nominale Pn pari alla potenza del carico, tenendo conto delle perdite nella trasmissione (cambio):
Pn ≥ Pm /ηt, W
dove ηt è il rendimento della trasmissione (cambio).
Ad un dato momento di resistenza del meccanismo di azionamento Ms, N ∙ m e la frequenza di rotazione dell'albero di uscita del cambio n2, rpm
Pm = Mc ∙ ω2, W
dove ω2 = 2π ∙ n2 / 60, rad / s
Per alcuni meccanismi di produzione che operano in modalità continua con un momento costante di resistenza dell'albero, esistono formule approssimative per determinare la potenza dei motori.
Calcolo della potenza e selezione del motore per carico a breve termine
I motori per il funzionamento a breve termine dell'azionamento elettrico sono selezionati in base alla loro potenza nominale, che deve essere uguale alla potenza del carico, tenendo conto della durata del funzionamento. I valori standard consentiti per i motori prodotti dall'industria per il funzionamento a breve termine sono 10, 30, 60, 90 minuti.
In assenza di motori a servizio intermittente, è possibile installare motori a servizio intermittente. In questo caso, un tempo di esecuzione di 30 minuti corrisponde a un ciclo di lavoro = 15%, 60 minuti corrisponde a un ciclo di lavoro = 25% e 90 minuti corrisponde a un ciclo di lavoro = 40%.In ultima istanza è possibile utilizzare motori per servizio continuo con Pn < P e loro successiva verifica delle condizioni termiche.
Calcolo della potenza e selezione del motore per carico intermittente
Per un azionamento elettrico funzionante in modalità intermittente, la potenza del motore viene calcolata utilizzando il metodo della perdita media o valori equivalenti. Il primo metodo è più accurato, ma più laborioso. È più conveniente utilizzare il metodo dei valori equivalenti A seconda del programma di carico dato P = f (t), M = f (t), I = f (t), vengono determinati i valori quadratici medi, che sono detto equivalente.
La potenza equivalente è la potenza RMS del diagramma di carico
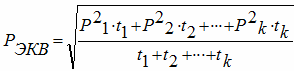
dove t1, t2, …, tk — intervalli di tempo in cui la potenza del carico è uguale a P1, P2, …, Pk, rispettivamente.
Secondo il catalogo, per i valori ottenuti di Reqv e PV, la potenza nominale del motore è selezionata dalla condizione Pn ≥ REKV.
Se viene dato il diagramma M = f (t), allora il momento equivalente
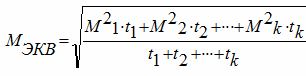
e la potenza equivalente alla velocità n è data dall'espressione
Req = Meq • n / 9550 (kW).
Se viene fornito il diagramma I = f (t), la corrente dell'equivalente di riscaldamento
Il valore calcolato di PVr spesso differisce dai valori standard, pertanto o il valore ottenuto di PVr viene arrotondato al valore standard più vicino oppure la potenza equivalente viene ricalcolata utilizzando la formula
Durante il funzionamento si osservano sovraccarichi a breve termine che superano la potenza nominale del motore. Non influiscono in modo significativo sul riscaldamento dei motori, ma possono portare a un funzionamento errato o allo stallo. Pertanto, il motore dovrebbe essere controllato per la capacità di sovraccarico secondo l'espressione
Pm / Pn = ku ∙ Mm / Mn,
dove Pm è la potenza più alta nel diagramma di carico; Mm / Mn — il multiplo della coppia massima è determinato dal catalogo; il coefficiente ku = 0,8 tiene conto della possibile caduta di tensione nella rete.
Se questa condizione non è soddisfatta, è necessario selezionare dal catalogo un motore con una potenza maggiore e verificare nuovamente la capacità di sovraccarico.
Vedi anche su questo argomento: Selezione di un motore per il funzionamento intermittente

L'industria produce una serie di serie di motori a carico intermittente:
-
gru asincrone con rotore scoiattolo della serie MTKF e con rotore di fase della serie MTF;
-
serie metallurgiche simili MTKN e MTN;
-
DC serie D.
Le macchine della serie specificata sono caratterizzate dalla forma di un rotore allungato (ancora), che fornisce una riduzione del momento di inerzia. Per ridurre le perdite rilasciate nell'avvolgimento statorico durante i transitori, i motori della serie MTKF e MTKN hanno uno scorrimento nominale maggiorato snom = 7 ÷ 12%. La capacità di sovraccarico dei motori della serie gru e metallurgica è 2,3 — 3 con ciclo di lavoro = 40%, che con ciclo di lavoro = 100% corrisponde a λ = Mcr / Mnom100 = 4,4-5,5.