Avvolgimenti statorici di un motore asincrono
Se osservi l'avvolgimento dello statore di un motore a induzione, scoprirai facilmente che non si tratta affatto di tre singoli avvolgimenti posti a 120 gradi l'uno dall'altro. Per ciascuna delle fasi di un avvolgimento trifase, di solito ci sono diverse sezioni. Queste sezioni assomigliano vagamente a sezioni dell'avvolgimento del rotore di un motore a collettore, ma in un motore a induzione svolgono funzioni completamente diverse.
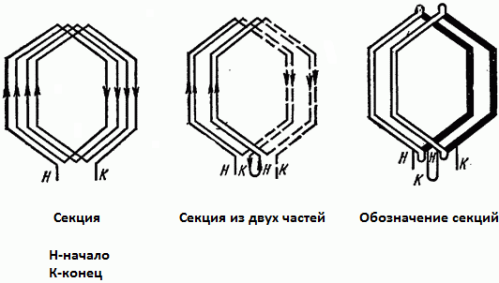
Guarda la prima immagine. Qui è mostrata una sezione con quattro turni. Tale sezione occupa almeno due cave di statore. Ma la sezione può sostanzialmente essere divisa a metà: ora ci sono quattro canali. Le due parti della sezione dovranno quindi essere collegate in serie in modo da sommare l'EMF in esse contenuto.
Poiché l'intero set di fili, isolato l'uno dall'altro in una sezione (o convenzionalmente - in una parte di una sezione), si inserisce in una scanalatura, è possibile designare un fascio di fili nello schema come un giro, anche se non c'è sono diversi giri in un solco. I conduttori attivi di ciascuna sezione possono essere posati nelle scanalature in uno strato o in due strati, come sul rotore di un motore a collettore.

Supponiamo che un motore a induzione trifase abbia una coppia di poli (2p = 2). Quindi, per ogni fase dell'avvolgimento su ciascun polo, cadrà un certo numero di slot dello statore: di norma, da 1 a 5 (q). Nel processo di progettazione della macchina, viene scelto il valore più adatto di questo numero q. Di conseguenza, il numero totale di slot sarà pari a — numero di poli * numero di fasi * slot per polo di fase (Z = 2pmq).
Ad esempio, ci sono: una coppia di poli, tre fasi, due cave per polo di fase. Quindi, il numero totale di canali: Z = 2 * 3 * 2 = 12 canali. La figura seguente mostra proprio un tale avvolgimento, dove ci sono 4 sezioni per ogni fase e ogni sezione è composta da due parti (due avvolgimenti per parte) - ogni parte è nella sfera di azione del suo polo (in due divisioni polari tau, divisione su un polo - 180 gradi, tutti i canali - 360 gradi).
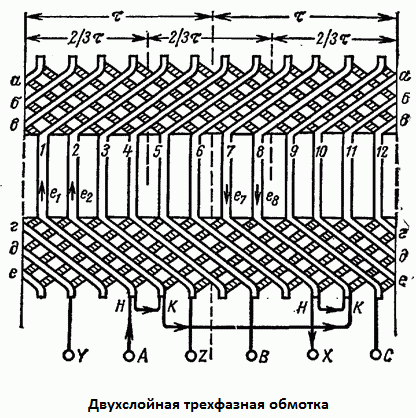
Gli slot sono divisi in fasi in questo modo: lasciate che il motore abbia due slot per polo per fase, quindi sulla prima divisione dei poli per la fase A, sono accettati gli slot 1 e 2, e sulla seconda divisione dei poli, 7 e 8, poiché Z / 2 = 6 e tau = 6 denti.
La seconda fase (B) è sfalsata dalla prima nello spazio di 120 gradi o di 2/3 tau, cioè di 4 denti, e quindi occupa i canali 5 e 6 della prima divisione polare e i canali 11 e 12 della seconda divisione dei poli.
Infine, la terza fase (C) si trova nei rimanenti canali 8 e 9 del secondo gradino polare e nei canali 3 e 4 del primo gradino polare. La marcatura della bobina viene sempre eseguita sullo strato esterno dei fili attivi.
Come hai già capito, per aggiungere l'EMF di ciascuna fase, le sezioni all'interno delle bobine sono collegate in serie e le bobine stesse (in divisioni polari opposte) sono collegate in modo opposto: la fine della prima è con la fine della seconda.
Gli avvolgimenti dello statore sono tradizionalmente collegati a una rete trifase secondo uno dei due schemi: stella o triangolo… Il triangolo è per 220 volt, la stella è per 380 volt.
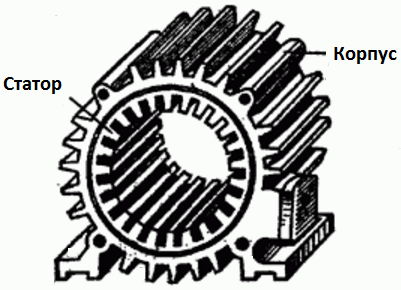
La figura mostra lo statore senza avvolgimento. Lo statore viene installato in un alloggiamento motore in alluminio, ghisa o acciaio premendo il nucleo all'interno. Il nucleo qui è costituito da singole lamiere di acciaio, ognuna delle quali è isolata con una speciale vernice elettrica.
All'esterno, l'alloggiamento presenta delle alette, grazie alle quali aumenta l'area di scambio termico con l'aria circostante e aumenta l'efficienza del raffreddamento attivo: una ventola di plastica montata sul rotore nella parte posteriore (sotto il coperchio posteriore con perforazione) soffia le alette e quindi raffredda il motore durante il funzionamento, proteggendo così le bobine dal surriscaldamento.