Caratteristiche meccaniche dei motori elettrici e meccanismi di produzione
 Quando si progetta un azionamento elettrico, il motore elettrico deve essere selezionato in modo che le sue caratteristiche meccaniche corrispondano alle caratteristiche meccaniche del meccanismo di produzione. Le caratteristiche meccaniche danno la relazione delle variabili allo stato stazionario.
Quando si progetta un azionamento elettrico, il motore elettrico deve essere selezionato in modo che le sue caratteristiche meccaniche corrispondano alle caratteristiche meccaniche del meccanismo di produzione. Le caratteristiche meccaniche danno la relazione delle variabili allo stato stazionario.
Una caratteristica meccanica del meccanismo è detta relazione tra la velocità angolare e il momento resistente del meccanismo, ridotto all'albero motore) ω = f (Mc).
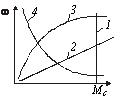
Riso. 1. Caratteristiche meccaniche dei meccanismi
Tra tutte le varietà, ci sono diversi tipi caratteristici di caratteristiche meccaniche dei meccanismi:
1. Caratteristica con momento resistente indipendente dalla velocità (retta 1 in Fig. 1). La caratteristica meccanica indipendente dalla velocità è disegnata come una linea retta parallela all'asse di rotazione, in questo caso verticale. Tale caratteristica è posseduta, ad esempio, da gru, argani, pompe a pistoni con altezza di mandata costante, ecc.
2.Una caratteristica con un momento di resistenza linearmente dipendente dalla velocità (riga 2 in Fig. 1). Questa dipendenza è insita, ad esempio, nell'azionamento di un generatore CC eccitato indipendentemente che funziona a carico costante.
3. Caratteristica con aumento non lineare della coppia (curva 3 in Fig. 1). Tipici esempi sono il funzionamento di ventilatori, pompe centrifughe, eliche. Per questi meccanismi, il momento Mc dipende dal quadrato della velocità angolare ω... Questo è il cosiddetto caratteristica meccanica parabolica (ventola).
4. Caratteristica con momento resistente decrescente non lineare (curva 4 in Fig. 1). Qui, il momento di trascinamento è inversamente proporzionale alla velocità di rotazione. In questo caso, la potenza rimane costante per tutta la gamma di velocità di funzionamento del meccanismo. Ad esempio, nei meccanismi del movimento principale di alcune macchine per il taglio dei metalli (tornitura, fresatura, foratura), il momento Mc cambia inversamente proporzionale a ω e la potenza consumata dal meccanismo rimane costante.
Le caratteristiche meccaniche del motore elettrico sono chiamate dipendenza della sua velocità angolare dalla coppia ωd = f (M). Qui va tenuto presente che il momento M sull'albero motore, indipendentemente dal senso di rotazione, ha un segno positivo: il momento del movimento. Allo stesso tempo, il momento di resistenza Mc ha segno negativo.
A titolo di esempio, le Figg. 2 mostra le caratteristiche meccaniche: 1 - motore sincrono; 2 — Motore DC con eccitazione indipendente; 3 — Motore a corrente continua con eccitazione in serie.
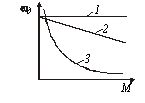 Riso. 2. Caratteristiche meccaniche dei motori elettrici
Riso. 2. Caratteristiche meccaniche dei motori elettrici
Per valutare le proprietà delle caratteristiche meccaniche di un azionamento elettrico, viene utilizzato il concetto di rigidità caratteristica.La rigidità della caratteristica meccanica è determinata dall'espressione
β = dM / dω
dove dM — variazione della coppia del motore; dωd — la corrispondente variazione della velocità angolare.
Per caratteristiche lineari il valore β rimane costante, per non lineari dipende dal punto di lavoro.
Usando questo concetto, le caratteristiche mostrate in Fig. 2, può essere valutato qualitativamente come segue: 1 — assolutamente rigido (β = ∞); 2 — solido; 3 — morbido.
Una caratteristica assolutamente difficile: la velocità di rotazione del motore rimane invariata quando il carico del motore passa da zero a nominale. I motori sincroni hanno questa caratteristica.
Caratteristica rigida: la velocità di rotazione cambia poco quando il carico cambia da zero a nominale. Questa caratteristica è posseduta da un motore CC ad eccitazione parallela nonché da un motore a induzione nella regione della parte lineare della caratteristica.
Una caratteristica rigida è considerata quella in cui la variazione di velocità non supera circa il 10% della velocità nominale quando il carico viene modificato da zero a nominale.
Caratteristica morbida: la velocità del motore cambia in modo significativo con variazioni di carico relativamente piccole. Questa caratteristica è posseduta da un motore a corrente continua con eccitazione in serie, mista o parallela, ma con resistenza aggiuntiva nel circuito dell'indotto, nonché asincrono con resistenza nel circuito del rotore.
Per la maggior parte dei meccanismi di produzione vengono utilizzati motori asincroni a gabbia di scoiattolo, che hanno caratteristiche meccaniche rigide.
Tutte le caratteristiche meccaniche dei motori elettrici sono suddivise in naturali e artificiali.
Le caratteristiche meccaniche naturali si riferiscono alle condizioni operative del motore con i valori nominali dei parametri.
Ad esempio, per un motore ad eccitazione parallela, è possibile tracciare la caratteristica naturale per il caso in cui la tensione di armatura e la corrente di eccitazione hanno valori nominali e non vi è alcuna resistenza aggiuntiva nel circuito di armatura.
La caratteristica naturale di un motore a induzione corrisponde alla tensione nominale e alla frequenza nominale della corrente alternata fornita allo statore del motore, a condizione che non vi sia resistenza aggiuntiva nel circuito del rotore.
Pertanto, per ogni motore, è possibile costruire una sola caratteristica naturale e un numero illimitato di caratteristiche artificiali. Ad esempio, ogni nuovo valore della resistenza dell'armatura di un motore a corrente continua o nel circuito del rotore di un motore a induzione ha le proprie caratteristiche meccaniche.
