Azionamento elettrico di paranchi elettrici e travi di gru
 I carrelli elettrici sospesi (paranchi elettrificati, paranchi e travi di gru) vengono utilizzati per sollevare e spostare carichi e parti di macchine durante i lavori di montaggio e riparazione in locali industriali. I paranchi elettrici, i montacarichi e le gru sono più piccoli dei carriponte, il che riduce le dimensioni degli edifici industriali e la loro manutenzione non richiede personale qualificato.
I carrelli elettrici sospesi (paranchi elettrificati, paranchi e travi di gru) vengono utilizzati per sollevare e spostare carichi e parti di macchine durante i lavori di montaggio e riparazione in locali industriali. I paranchi elettrici, i montacarichi e le gru sono più piccoli dei carriponte, il che riduce le dimensioni degli edifici industriali e la loro manutenzione non richiede personale qualificato.
I carrelli elettrici sospesi sono progettati per il sollevamento e lo spostamento di merci negli impianti di produzione lungo un percorso rigorosamente definito.
Un carrello elettrico (Fig. 1) è costituito da 3 parti principali: un meccanismo di sollevamento (paranco elettrico) progettato per sollevare (abbassare) e trattenere il carico, un meccanismo di movimento (carro) progettato per spostare il carico sollevato in una direzione di posizione strettamente definita , una monorotaia che definisce il movimento orizzontale in due direzioni.
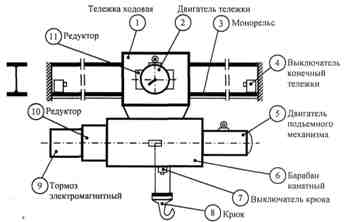
Riso. 1. Schema cinematico del carrello elettrico sospeso
Il paranco elettrico è montato su un carrello di lavoro e comprende le seguenti apparecchiature: motore elettrico (5) del meccanismo di sollevamento, riduttore cilindrico (10) per ridurre la velocità di rotazione del motore elettrico ad un valore che fornisce una data velocità lineare di sollevando (abbassando) il gancio, freno elettromagnetico (9), per arrestare il motore del vano quando questo è scollegato dalla rete o la tensione scompare nella rete, viene azionato un freno di frenatura, agendo sulla forza delle molle, quando gli alberi sono avvolti attorno all'albero, il finecorsa (7) del gancio, per limitare il sollevamento del gancio, quando viene premuto, il motore viene scollegato dalla rete e rallenta, il tamburo della fune (6), per l'avvolgimento ( svolgimento) e deposito della fune, il gancio (8), per il fissaggio del carico sollevato .
Il sottocarro è montato sulla monorotaia (3), supportato dalle ruote scorrevoli sulle ali inferiori della doppia rotaia. Azionamento delle ruote attraverso un riduttore cilindrico (11) da un motore elettrico (2).
Monorotaia — Trave a I con finecorsa (4) alle estremità per limitare il movimento orizzontale.
Il paranco elettrico TEP-1 (capacità di carico 1 t, tensione 380 V) è costituito da meccanismi di sollevamento e spostamento con azionamenti elettrici individuali. Il tamburo di lavoro 2 è azionato dal motore 20 attraverso un riduttore epicicloidale costituito da satelliti 5, 7, 8, ingranaggi a blocco 13, ingranaggi solari 6, 9, supporto 14, 15. L'albero motore principale 4 quando il motore è spento viene arrestato dai dischi 10 sotto l'azione della molla 11.
Per azionare il meccanismo di sollevamento a una velocità di 6,5-6,9 m / s, viene utilizzato un motore asincrono con scorrimento maggiorato del tipo AOS-32-4M (potenza 1,4 kW a 1320 giri / min e ciclo di lavoro = 25%).Il movimento verso l'alto del gancio è limitato da un finecorsa.
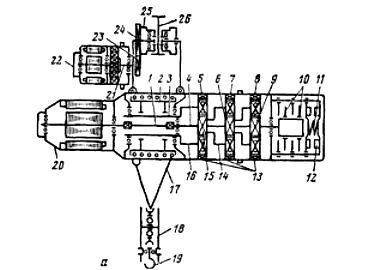
Riso. 2. Azionamento elettrico del paranco elettrico TEP -1: 1 - tamburo di lavoro, 3 - albero cavo, 4 - albero di lavoro, 5, 7, 8 - satelliti, 6, 9, 15 - ingranaggi solari, 10 - dischi freno, 11 - molla del freno, 12 - elettromagneti, 13 - ingranaggi a blocco, 14, 16, 21 - supporti, 17 - cavo, 18 - sospensione, 19 - gancio, 20 - motore elettrico per il sollevamento del carico, 22 - motore elettrico del carrello, 23, 24 — ingranaggi, 25 — rullo, 26 — monorotaia.
La figura 3 mostra il funzionamento del paranco. L'efficienza del paranco elettrico aumenta a 0,58 man mano che la massa del carico sollevato aumenta a 1000 kg.
Interessante modalità di funzionamento del motore 4 durante l'abbassamento del carico: mentre il peso del carico è inferiore a 425 kg, il motore elettrico funziona in modalità motore e quando la massa supera i 425 kg - in modalità generatore. Pertanto, per superare il momento di inattività del meccanismo di sollevamento, è sufficiente un carico del peso di 425 kg.
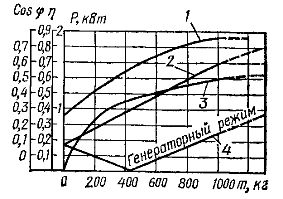
Riso. 3. Caratteristiche operative di un paranco elettrico: 1 - ssphi del motore elettrico, 2 - la potenza del motore elettrico durante il sollevamento del carico, 3 - efficienza, 4 - la potenza del motore elettrico durante l'abbassamento del carico.
Ad azionare il sottocarro del paranco elettrico, un motore elettrico asincrono 22 (Fig. 2) del tipo TEM-0,25 (potenza 0,25 kW a 1410 rpm e duty cycle = 25%) con riduttore epicicloidale monostadio incorporato e ingranaggio 23, 24, che trasmette la rotazione dei rulli 25. I dispositivi di frenatura non sono montati sui meccanismi di movimento dei paranchi più semplici. Il movimento del paranco lungo la trave in entrambe le direzioni è limitato da arresti meccanici.
 Una gru a bandiera differisce da un paranco in quanto la trave su cui scorre il paranco può muoversi all'interno della sala di produzione, azionata da un motore elettrico a gabbia di scoiattolo oa rotore di fase. Il ponte della trave della gru, che ha un meccanismo di azionamento elettrico, è realizzato sotto forma di un'unica trave su cui si muove il carrello elettrico.
Una gru a bandiera differisce da un paranco in quanto la trave su cui scorre il paranco può muoversi all'interno della sala di produzione, azionata da un motore elettrico a gabbia di scoiattolo oa rotore di fase. Il ponte della trave della gru, che ha un meccanismo di azionamento elettrico, è realizzato sotto forma di un'unica trave su cui si muove il carrello elettrico.
I motori asincroni trifase con rotore a gabbia di scoiattolo vengono utilizzati per azionare auto elettriche fuoribordo e solo con un'elevata capacità di carico e la necessità di regolazione della velocità e "atterraggio" regolare di motori asincroni di carico con rotore di fase.
A causa della mancanza della bassa velocità necessaria per l'atterraggio regolare dei carichi o l'arresto preciso della gru, l'operatore deve periodicamente accendere e spegnere i motori elettrici, e questo aumenta il numero di avviamenti e provoca il riscaldamento degli avvolgimenti, oltre a ridurre il resistenza all'usura dei contatti. Pertanto, su alcune gru sono presenti azionamenti elettrici per il sollevamento e la traslazione con due velocità operative: nominale e ridotta, che vengono forniti utilizzando motori asincroni a due velocità anziché a velocità singola o un micro-azionamento aggiuntivo.
 I carrelli elettrici sospesi a bassa velocità (0,2 - 0,5 m / s) alimentati da motori a gabbia di scoiattolo sono generalmente controllati dal livello del pavimento (suolo) mediante stazioni a pulsante… Nei carrelli pneumatici e nelle gru con cabina per l'operatore (a una velocità di 0,8 - 1,5 m / s), i motori con rotore di fase sono controllati da controller.
I carrelli elettrici sospesi a bassa velocità (0,2 - 0,5 m / s) alimentati da motori a gabbia di scoiattolo sono generalmente controllati dal livello del pavimento (suolo) mediante stazioni a pulsante… Nei carrelli pneumatici e nelle gru con cabina per l'operatore (a una velocità di 0,8 - 1,5 m / s), i motori con rotore di fase sono controllati da controller.
I motori elettrici dei paranchi e delle gru a ponte sono comandati da avviatori magnetici reversibili e pulsanti di avviamento sospesi da un cavo armato flessibile.La tensione alle bobine e ai contatti dei contattori per sollevare KM1 (Fig. 4), abbassare KM2, spostare KMZ in avanti e indietro KM4 viene fornita attraverso un interruttore automatico e un cavo o fili di contatto. Il movimento verso l'alto del dispositivo di sollevamento è limitato da un finecorsa. MQ.
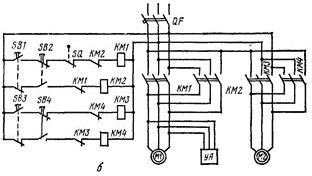
Riso. 4. Schema elettrico della trave della gru
Il blocco dei contattori di inversione dei motori dall'accensione simultanea viene effettuato mediante pulsanti a doppio circuito e blocco meccanico dei contattori stessi (o apertura dei contatti ausiliari dei contattori).
Sui paranchi elettrici e sulle gru a ponte, i pulsanti di avvio non vengono bypassati dai corrispondenti contatti di interblocco del contattore di chiusura, impedendo al paranco di continuare a funzionare dopo che l'operatore ha rilasciato la pulsantiera della pulsantiera. Contemporaneamente al motore di sollevamento viene azionato il solenoide UA che apre il freno.
Il tempo di avvio massimo consentito per i meccanismi di sollevamento è 3 - 5 s, per i meccanismi di movimento - 10 - 15 s.
Puoi anche vedere: Apparecchiature elettriche e catene di paranchi elettrici
La modalità di funzionamento dei motori di carrelli elettrici, paranchi elettrici e gru a ponte dipende dal loro scopo. Se le merci vengono spostate su carroponti per brevi distanze, i motori funzionano in una vergognosa modalità a breve termine (ad esempio, nei carrelli che servono sezioni di officine o magazzini).

Per i carriponte che trasportano merci attraverso il territorio dello stabilimento su distanze relativamente grandi, le modalità operative dei motori di sollevamento e movimentazione sono diverse: la prima è caratterizzata da una modalità a breve termine, la seconda da una a lungo termine. dei motori per il sollevamento e la movimentazione di paranchi elettrici, paranchi e gru a cavalletto è determinato allo stesso modo dei motori dei meccanismi delle gru a ponte.