Forme strutturali dei motori asincroni
 Forme strutturali esterne motori asincroni sono determinati dal modo in cui il motore è montato e dalla forma della sua protezione dall'influenza dell'ambiente. Le normali prestazioni motorie delle gambe sono molto diffuse (Fig. 1, a). In questo caso l'albero motore deve essere orizzontale. I motori con flange (Fig. 1, b) sono ampiamente utilizzati per installazioni orizzontali e verticali.
Forme strutturali esterne motori asincroni sono determinati dal modo in cui il motore è montato e dalla forma della sua protezione dall'influenza dell'ambiente. Le normali prestazioni motorie delle gambe sono molto diffuse (Fig. 1, a). In questo caso l'albero motore deve essere orizzontale. I motori con flange (Fig. 1, b) sono ampiamente utilizzati per installazioni orizzontali e verticali.
Producono anche motori a induzione in linea che non hanno telaio, scudi, albero. Gli elementi di un tale motore sono incorporati nelle parti del corpo della macchina e l'albero del motore è uno degli alberi della macchina (spesso il mandrino) e il letto è il corpo del gruppo macchina, ad esempio una testa di rettifica (Fig. 2).
All'estero sono ampiamente diffusi motori a disegno speciale, tra cui motori di piccole dimensioni radiali e di notevole lunghezza, e motori a disco, in particolare con statore cilindrico e rotore esterno anulare. Vengono utilizzati anche motori, quando vengono accesi, il rotore, che ha la forma di un cono, si muove in direzione assiale, sviluppando una notevole forza di spinta.
Questa forza viene utilizzata per sbloccare il freno meccanico che agisce sull'albero del motore dopo che il motore è stato scollegato dalla rete. Inoltre, vengono utilizzati numerosi modelli di motore con riduttori, riduttori e variatori meccanici collegati che forniscono una regolazione uniforme.
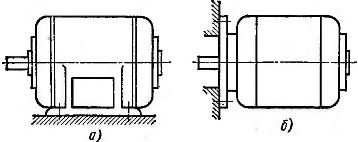
Riso. 1. Progettazione di motori asincroni
Lo svantaggio dell'utilizzo di motori con forme costruttive speciali è la difficoltà di sostituirli in caso di incidente. Un motore elettrico difettoso non deve essere sostituito, ma riparato e la macchina deve essere girata al minimo durante la riparazione.
Per azionare le macchine vengono utilizzati motori con varie forme di protezione ambientale.
I motori schermati sono dotati di griglie che coprono le prese d'aria sugli scudi. Ciò impedisce l'ingresso di corpi estranei nel motore e impedisce anche al lavoratore di toccare parti rotanti e sotto tensione. Per evitare che le gocce di liquido cadano dall'alto, i motori sono dotati di prese d'aria verso il basso o verticali.
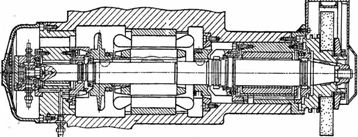
Riso. 2. Motore di macinazione incorporato
Tuttavia, quando un tale motore elettrico funziona in un'officina, la sua ventola, insieme all'aria, aspira polvere, spruzza refrigerante o olio, nonché piccole particelle di acciaio o ghisa che, aderendo all'isolamento dell'avvolgimento e vibrando sotto l'influenza di un campo magnetico alternato, consuma rapidamente l'isolamento.
I motori chiusi, i cui schermi terminali non hanno fori di ventilazione, hanno una protezione più affidabile contro gli influssi ambientali. Tali motori, delle stesse dimensioni di quelli protetti, a causa di un raffreddamento più scarso, hanno una potenza inferiore.A parità di potenza e velocità, il motore elettrico chiuso è 1,5-2 volte più pesante di quello protetto e, di conseguenza, il suo prezzo è più alto.
La volontà di ridurre le dimensioni e il costo dei motori chiusi ha portato alla creazione di motori elettrici soffiati chiusi. Tale motore elettrico ha una ventola esterna montata sull'estremità dell'albero motore opposta all'estremità di azionamento e coperta da un cappuccio. Questa ventola soffia intorno all'alloggiamento del motore.
I motori dei ventilatori sono significativamente più leggeri ed economici di quelli chiusi. I motori soffiati sono spesso utilizzati per azionare macchine per il taglio dei metalli. I motori con altre forme di protezione ambientale sono usati relativamente raramente per azionare macchine per il taglio dei metalli. In particolare, i motori elettrici chiusi vengono talvolta utilizzati per azionare le rettificatrici.
I motori elettrici sono progettati per tensioni standard di 127, 220 e 380 V. Lo stesso motore può essere collegato a reti con tensioni diverse, ad esempio a reti con tensioni di 127 e 220 V, 220 e 380 V. con due tensioni, il l'avvolgimento dello statore del motore elettrico è collegato in un triangolo, per uno più grande - in una stella. La corrente negli avvolgimenti del motore elettrico e la tensione in essi sarà la stessa in entrambi i casi con questa inclusione. Inoltre, producono motori elettrici 500 V, i loro statori sono collegati in modo permanente a stella.
I motori asincroni a gabbia di scoiattolo utilizzati in molti settori sono prodotti con una potenza nominale di 0,6-100 kW per velocità sincrone 600, 750, 1000, 1500 e 3000 giri/min.
La sezione trasversale dei fili dell'avvolgimento del motore elettrico dipende dall'entità della corrente che lo attraversa. Con una corrente maggiore, l'avvolgimento del motore avrà un volume maggiore.La sezione trasversale del circuito magnetico è proporzionale alla grandezza del flusso magnetico. In questo modo le dimensioni del motore elettrico sono determinate dai valori calcolati di corrente e flusso magnetico o dalla coppia nominale del motore elettrico. Potenza nominale del motore

dove P.n - potenza nominale, kW, Mn- momento nominale, N • m, nn- velocità nominale, rpm.
La potenza nominale per la stessa cilindrata aumenta all'aumentare della sua velocità nominale. Pertanto, i motori elettrici a bassa velocità sono più grandi dei motori ad alta velocità della stessa potenza.
Quando si rettificano piccoli fori, sono necessarie velocità del mandrino di rettifica molto elevate per ottenere velocità di taglio adeguate. Quindi, durante la rettifica con una mola del diametro di 3 mm a una velocità di soli 30 m / s, la velocità del mandrino dovrebbe essere pari a 200.000 giri al minuto. Ad elevate velocità del mandrino, la forza di bloccaggio può essere ridotta drasticamente. Allo stesso tempo, la rettifica della mola e la piegatura del mandrino sono ridotte e la finitura superficiale e la precisione di lavorazione sono aumentate.
In relazione a quanto sopra, l'industria utilizza numerosi modelli del cosiddetto. Elettromandrini con velocità di rotazione di 12.000-144.000 rpm e superiori. L'elettromandrino (Fig. 3, a) è un mandrino di rettifica su cuscinetti a rotolamento con motore a gabbia di scoiattolo ad alta frequenza incorporato. Il rotore del motore si trova tra due cuscinetti all'estremità del mandrino opposta alla mola.
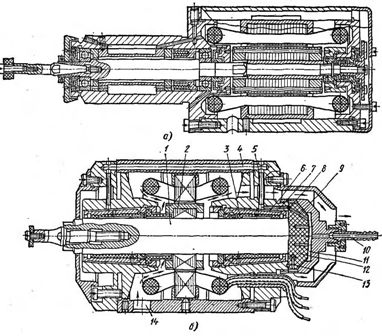
Riso. 3. Elettromandrini
Lo statore dell'elettromandrino è assemblato in lamiera di acciaio elettrico. Su di esso è posizionata una bobina bipolare.Anche il rotore del motore a velocità fino a 30.000-50.000 giri/min è composto da lamiera e fornito con un avvolgimento di cortocircuito convenzionale. Tendono a ridurre il più possibile il diametro del rotore.
La scelta del tipo di cuscinetto è di particolare importanza per il funzionamento degli elettromandrini. Sono comunemente usati cuscinetti a sfera di precisione, che funzionano con un precarico creato utilizzando molle calibrate. Tali cuscinetti sono utilizzati per velocità di rotazione che non superano i 100.000 giri al minuto.
I cuscinetti aerostatici sono ampiamente utilizzati nell'industria (Fig. 3, b). L'albero 1 del motore elettrico ad alta frequenza ruota su cuscinetti 3 lubrificati ad aria. Il carico assiale viene assorbito dal cuscino d'aria tra l'estremità dell'albero e il cuscinetto di supporto 12, contro il quale l'albero viene premuto sotto la pressione dell'aria fornita all'interno dell'alloggiamento attraverso il foro 14 per il raffreddamento del motore. l'aria compressa passa attraverso il filtro ed entra attraverso il raccordo 10 nella camera 11. Da qui, attraverso il canale 9 e la scanalatura circolare 8, l'aria passa nel canale 7 e nella camera 6. Da qui l'aria entra nel cuscinetto spacco. L'aria viene fornita al cuscinetto sinistro attraverso i tubi 5 e i canali 4 nell'alloggiamento del motore.
L'aria di scarico viene scaricata attraverso i canali 13. Il cuscino d'aria nell'intercapedine del cuscinetto di supporto è creato dall'aria che passa dalla camera 11 attraverso il cuscinetto in grafite di carbonio porosa. Ogni cuscinetto ha ottone conico. Al suo interno viene pressato un rivestimento in grafite di carbonio, i cui pori sono riempiti di bronzo. Prima dell'avviamento dell'elettromandrino viene fornita aria e vengono formati dei cuscini d'aria tra il mandrino e le boccole. Ciò elimina l'attrito e l'usura dei cuscinetti durante l'avvio.Successivamente, il motore viene acceso, la velocità del rotore 2 raggiunge la velocità nominale in 5-10 s. Quando il motore è spento, il rotore 2 ruota per inerzia per 3-4 minuti. Per ridurre questo tempo, viene utilizzato un freno elettrico.
L'utilizzo di air bag riduce drasticamente le perdite per attrito nell'elettromandrino, il consumo d'aria è di 6-25 m3/h.
Sono stati utilizzati anche elettromandrini su cuscinetti con lubrificazione a liquido. Il loro funzionamento richiede una circolazione continua di olio ad alta pressione, altrimenti il riscaldamento dei cuscinetti diventa inaccettabile.
La produzione di motori elettrici ad alta frequenza richiede la fabbricazione di precisione delle singole parti, l'equilibratura dinamica del rotore, l'assemblaggio preciso e la garanzia di una rigorosa uniformità della distanza tra lo statore e il rotore. La frequenza della corrente che alimenta il motore elettrico ad alta frequenza viene selezionata in base alla velocità richiesta del motore elettrico:

dove nSe la frequenza sincrona di rotazione del motore elettrico, rpm, f è la frequenza della corrente, Hz, p è il numero di poli, poiché p = 1, quindi

A velocità di rotazione sincrona degli elettromandrini di 12.000 e 120.000 giri/min, la frequenza di corrente dovrebbe essere pari rispettivamente a 200 e 2000 Hz.
Generatori speciali vengono utilizzati per alimentare motori ad alta frequenza. Nella fig. 4 mostra un generatore di induzione sincrono trifase. Lo statore del generatore ha fessure larghe e strette. La bobina di campo, che si trova nelle ampie fessure dello statore, è alimentata con corrente continua. Il campo magnetico dei conduttori di questa bobina è chiuso attraverso i denti dello statore e le sporgenze del rotore come mostrato in fig. 4 con linea tratteggiata.
Quando il rotore ruota, il campo magnetico che si muove lungo le sporgenze del rotore attraversa le spire dell'avvolgimento di corrente alternata situato nelle strette fessure dello statore e induce un e alternato. eccetera. c. La frequenza di questo e. eccetera. v. dipende dalla velocità e dal numero di orecchie del rotore. Le forze elettromotrici indotte dallo stesso flusso negli avvolgimenti di campo si annullano a causa dell'imminente attivazione delle bobine. Le bobine di campo sono alimentate da un raddrizzatore collegato alla rete. Lo statore e il rotore hanno nuclei magnetici in lamiera di acciaio elettrico.
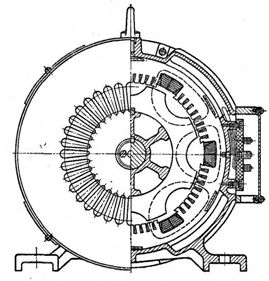
Riso. 4. Generatore di induzione ad alta frequenza
I generatori con il design descritto sono prodotti per potenze nominali da 1 a 3 kW e frequenze da 300 a 2400 Hz. I generatori sono azionati da motori asincroni con una velocità sincrona di 3000 giri/min.
I generatori di induzione con maggiore frequenza stanno iniziando a essere sostituiti da convertitori a semiconduttore (tiristori). In questo caso, solitamente forniscono la possibilità di modificare la frequenza della corrente e quindi la possibilità di regolare la velocità di rotazione del motore elettrico. Se durante tale regolazione la tensione viene mantenuta costante, viene eseguita una regolazione della potenza costante. Se il rapporto tra tensione e frequenza della corrente (e quindi il flusso magnetico del motore) viene mantenuto costante, la regolazione viene eseguita con una coppia costante a tutte le velocità per un lungo periodo di tempo.
I vantaggi degli azionamenti con convertitore di frequenza a tiristori e motore asincrono a gabbia di scoiattolo sono l'elevata efficienza e la facilità d'uso. Lo svantaggio è ancora il prezzo elevato.Nell'ingegneria meccanica, è consigliabile utilizzare un tale azionamento per motori ad alta frequenza. Unità sperimentali di questo tipo sono state create nel nostro paese.
I motori asincroni bifase a bassa potenza sono spesso utilizzati negli azionamenti esecutivi delle macchine utensili. Lo statore di un tale motore ha due avvolgimenti: avvolgimento di campo 1 e avvolgimento di controllo 2 (Fig. 5, a). Il rotore 4 in una gabbia di scoiattolo ha una grande resistenza attiva. Gli assi delle bobine sono perpendicolari tra loro.
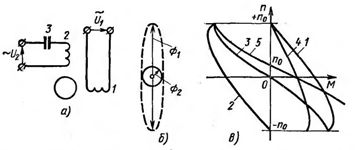
Riso. 5. Schema di un motore a induzione bifase e sue caratteristiche
Agli avvolgimenti sono applicate le tensioni Ul e U2. Quando il condensatore 3 è collegato al circuito della bobina 2, la corrente in esso supera la corrente nella bobina 1. In questo caso, si forma un campo magnetico ellittico rotante e il rotore 4 dello scoiattolo inizia a ruotare. Se si riduce la tensione U2, diminuirà anche la corrente nella bobina 2. Ciò porterà a un cambiamento nella forma dell'ellisse del campo magnetico rotante, che diventa sempre più allungato (Fig. 5, b).
Un motore a campo ellittico può essere considerato come due motori su un albero, uno funzionante con un campo pulsante F1 e l'altro con un campo circolare F2. Il motore a campo pulsante F1 può essere pensato come due motori a induzione a campo circolare identici cablati per ruotare in direzioni opposte.
Nella fig. 5, c mostra le caratteristiche meccaniche 1 e 2 di un motore a induzione con un campo rotante circolare e una significativa resistenza attiva del rotore durante la rotazione in direzioni diverse. La caratteristica meccanica 3 di un motore monofase può essere costruita sottraendo i momenti M delle caratteristiche 1 e 2 per ogni valore di n.A qualsiasi valore di n, la coppia di un motore monofase con elevata resistenza del rotore viene arrestata. La caratteristica meccanica del motore a campo circolare è rappresentata dalla curva 4.
La caratteristica meccanica 5 di un motore bifase può essere costruita sottraendo i momenti M delle caratteristiche 3 e 4 a qualsiasi valore di n. Il valore di n0 è la velocità di rotazione di un motore a induzione bifase al minimo ideale. Regolando la corrente di alimentazione della bobina 2 (Fig. 5, a), è possibile modificare la pendenza della caratteristica 4 (Fig. 5, c), e quindi il valore di n0. In questo modo si effettua il controllo della velocità di un motore a induzione bifase.
Quando si opera con valori di scorrimento elevati, le perdite nel rotore diventano piuttosto significative. Per questo motivo la norma considerata è utilizzata solo per azionamenti ausiliari di bassa potenza. Per ridurre i tempi di accelerazione e decelerazione vengono utilizzati motori a induzione bifase con rotore cavo. In un tale motore, il rotore è un cilindro cavo di alluminio a parete sottile.