Apparecchiature elettriche per segherie
 Nelle segherie, l'attrezzatura principale per il taglio del legname tondo in tavole, travi e altri assortimenti è l'attrezzatura principale per le segherie.
Nelle segherie, l'attrezzatura principale per il taglio del legname tondo in tavole, travi e altri assortimenti è l'attrezzatura principale per le segherie.
Il telaio della sega è una macchina multisega con le seghe tese in un telaio rigido. Le segherie verticali sono realizzate in piano singolo e doppio, aperture strette e larghe, con jogging e alimentazione continua. Gli ultimi telai delle segherie hanno da tre a sei motori elettrici. Velocità di rotazione dell'albero motore — da 200 a 600 min-1, l'azionamento è effettuato da un motore asincrono con rotore avvolto e talvolta da un motore a rotore a gabbia di scoiattolo.
Sul telaio della sega (Fig. 1), i tronchi con una lunghezza di 3,2–9 me un diametro di 65 cm vengono tagliati nel taglio frontale. Il telaio in ghisa del telaio è costituito da due gambe e pareti laterali collegate tra loro da collegamenti trasversali.
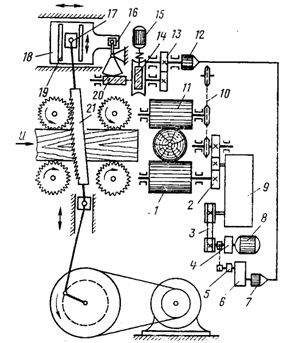
Riso. 1. Schema cinematico del telaio della segheria
Il telaio della segheria è montato su una piastra di base. Un albero motore con due volani e una puleggia motrice ruota in due cuscinetti di banco montati su una piastra.La biella della trave a I è collegata con la testa inferiore al perno dell'albero motore attraverso un cuscinetto a rulli e la testa superiore è collegata al perno attraverso la traversa inferiore del telaio della sega attraverso il cuscinetto ad aghi.
Le traverse inferiore e superiore del telaio della sega sono collegate da supporti tubolari tondi. I cursori in textolite con perni sulle traverse del telaio della sega sono collegati da cuscinetti a rulli conici.
Il design del telaio della sega consente l'uso di un tenditore idraulico. Delle sue otto guide, quattro sono prismatiche e quattro piatte, fissate a coppie a piastre in ghisa montate sul basamento. Le piastre di guida superiori sono montate su una slitta e vengono spostate dal meccanismo di inclinazione del telaio della sega, a seconda delle dimensioni dell'appezzamento Δ.
L'azionamento individuale del meccanismo di alimentazione a quattro rulli, costituito da un azionamento a tiristori, garantisce una regolazione regolare della velocità di alimentazione del tronco. La coppia viene trasmessa ai rulli inferiori 1 dal motore 8 tramite un elettromagnete, una frizione elettromagnetica 4, una trasmissione a cinghia 3, un cambio 9 e ingranaggi 2. I rulli superiori 11 ruotano attraverso una catena a rulli 10.
La dimensione dei pacchi viene regolata cambiando la slitta della frizione elettromagnetica 4, effettuata ruotando la manopola del regolatore centrifugo 5. A tale scopo, l'operatore accende il servomotore 15, ruotando la manopola nell'angolo appropriato, la rotazione è effettuata dall'ingranaggio a vite senza fine 14, dagli ingranaggi 13, dal sensore selsyn 12, dal ricevitore selsyn 7 e dal riduttore 6.Variando la camera Δ contemporaneamente tramite la vite senza fine 20 e la leva 16, il piatto 18 si sposta nel piano orizzontale con le guide 19 della slitta superiore 17 del telaio della sega e l'inclinazione della sega 21 cambia.
Uno schema circuitale schematico di un telaio di segheria 2P80 è mostrato in fig. 2. Il suo equipaggiamento elettrico è costituito da un motore asincrono di azionamento dell'albero principale da 125 kW M1, motore M2 di azionamento del meccanismo di inclinazione del telaio della sega, motore della stazione idraulica MZ, motore della pompa di lubrificazione M4 e sistema di controllo automatico, basato su un azionamento a tiristori con un motore a corrente continua M5.
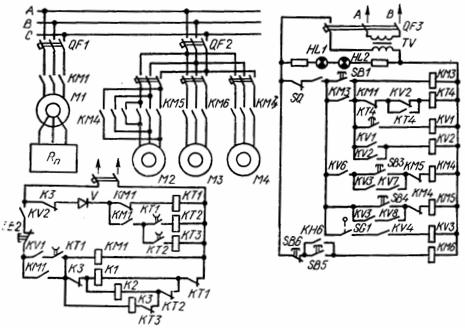
Riso. 2. Schema elettrico del telaio della segheria 2P80
La massima protezione di corrente dei motori è fornita da interruttori automatici: QF1 - motore M1, QF2 - motori M2, MZ, M4 e QF3 - circuiti di controllo Quando QF3 è acceso, le spie HL1 e HL2 si accendono. Il motore dell'albero principale M1 viene avviato utilizzando il contattore lineare KM1 e il motore di azionamento del motore di avanzamento M5 viene avviato utilizzando il contattore KM2.
Il circuito elettrico di controllo comprende: circuiti di potenza (motori di azionamento); circuiti di controllo relè-contattore e circuiti del sistema di controllo automatico basato su azionamento CC a tiristori. Per attivare l'avvio dell'azionamento del telaio della sega quando il cancello superiore è aperto, vengono rimosse le cinghie di sicurezza dell'albero principale e della cinghia trapezoidale e, quando il telaio della sega è fermo, vengono utilizzati i finecorsa (il cui blocco è indicato in Fig. 2 con le lettere SQ).
L'avviamento del motore M1 a rotore avvolto viene effettuato in funzione del tempo chiudendo in sequenza i relè di accelerazione KT1, KT2 e KT3, che con un determinato ritardo emettono gradualmente tre stadi del reostato di avviamento Rp mediante i contattori K1, K2 e K3.
Premendo il pulsante di avvio SB1 (vedi Fig. 2) si accende la bobina del contattore KM3, che chiude i contatti di potenza KM3 del motore M4 della pompa dell'olio, il contatto di chiusura KM3 bypassa il pulsante SB1.
Il motore principale di moto M1 viene avviato quando il contatto KV1 del relè intermedio KV1 è chiuso. La bobina di questo relè riceve alimentazione attraverso il contatto KT4 del relè a tempo KT4, che quando chiuso si chiuderà con un ritardo. Pertanto, il relè KT4 fornisce un ritardo tra l'avvio del motore M4 e M1.
Quando il relè KV1 è acceso, il relè KV2 si accende contemporaneamente, il cui contatto di chiusura KV2 eccita la bobina del contattore KM1. La bobina KM1, dopo aver ricevuto l'alimentazione, accende i contatti principali KM1 del circuito di potenza del motore M1 e il rotore del motore inizierà a ruotare quando il reostato di avviamento è completamente impostato. Dopo che i contattori di accelerazione K1, K2 e K3 funzionano con decelerazione, il rotore del motore ruoterà alla massima velocità.
Quando l'avvio del motore M1 è completo, il contatto di apertura K3 interromperà contemporaneamente il circuito di alimentazione dei contattori K1 e K2 e il contatto K3 nel circuito di avviamento del motore dell'alimentatore M5 si chiuderà e lo preparerà per l'avviamento. Il motore viene arrestato premendo il pulsante SB2.
L'impianto idraulico provvede al sollevamento e all'abbassamento delle porte anteriori e posteriori, sui cui involucri saldati sono montati i rulli di alimentazione superiori.I cancelli vengono sollevati nella posizione superiore da cilindri idraulici azionati da una stazione idraulica. L'azionamento della stazione idraulica è fornito dal motore M3, che viene avviato premendo un pulsante, mentre viene eccitata la bobina KM6 dell'avviatore, che chiude i contatti principali di KM6.
L'inclinazione del telaio della sega può essere controllata manualmente (premendo i pulsanti SB3 e SB4) o automaticamente. Con il controllo automatico dell'avvolgimento KM4 dell'avviatore KM4 ("più") e KM5 dell'avviatore KM5 ("meno"), ricevono alimentazione tramite il relè KV3, che si accende quando l'interruttore di modalità è in posizione "Automatico" , cioè quando il contatto SQ1 è chiuso.
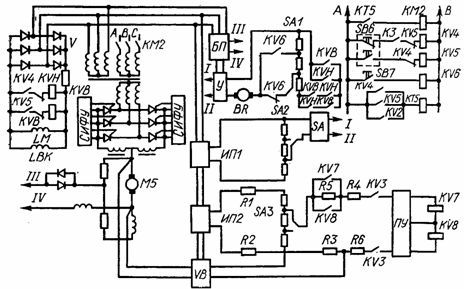
L'alimentatore a tiristori è costituito da un motore CC M5 e da un convertitore a tiristori. Il convertitore a tiristori (Fig. 9.2, c) viene acceso dall'avviatore KM2, attraverso il contatto KV3, la cui bobina riceve alimentazione quando il contatto del relè temporale KT5, che si trova nel suo circuito, è chiuso. Il temporizzatore KT5 sarà eccitato quando le bobine KV4 (marcia avanti) o KV5 (marcia indietro) sono eccitate.
Se il tronco si blocca durante il taglio, viene ritirato invertendo il motore. Non è possibile avviare il motore dell'alimentatore senza che il motore M1 sia in funzione. Ciò è garantito dall'inclusione del contatto K3 nel circuito di alimentazione KV4, che si chiude al termine dell'avviamento del motore M1. Quando l'avviatore KM2 è acceso, il convertitore e gli avvolgimenti di campo LM del motore sono eccitati.
Se il registro è bloccato, premendo il pulsante SB6 si disattivano i relè KV4 e KVB e si accendono i relè KV5 e KVH.In questo caso, il relè KVH chiude i suoi contatti nel circuito di alimentazione dell'amplificatore U, che è incluso nel convertitore a tiristori, di conseguenza, la polarità della tensione all'uscita del convertitore cambia e il motore cambia la direzione di rotazione.

La stabilità della velocità di rotazione al variare del carico è assicurata da una retroazione negativa, implementata da una dinamo tachimetrica BR con bobina di eccitazione LBL. L'armatura BR è collegata all'ingresso dell'amplificatore V. Il transitorio è forzato dall'uso della frenatura rigenerativa nel circuito del convertitore a tiristori.
La velocità di avanzamento viene regolata manualmente e automaticamente. Per questo, l'interruttore SA è impostato. Nella regolazione manuale della velocità di avanzamento, il regolatore di velocità è collegato all'amplificatore U attraverso i circuiti I e II. I regolatori di velocità SA1 - SA3 sono interruttori per pannelli a cui sono collegati resistori MLT.
Lo spostamento del contatto mobile SA1 modifica il segnale di controllo che entra nel sistema di controllo della fase di impulso (SPPC) attraverso l'amplificatore PU, che modifica l'angolo di accensione dei tiristori collegati da un circuito raddrizzatore a ponte, a causa del quale cambia la velocità del motore M5.
Per regolare automaticamente la velocità del motore M5 tramite l'interruttore SA, SA1 viene disconnesso dal blocco amplificatore Y e collegato all'amplificatore Y SA2, il sensore del diametro del perno. In questo caso, SA1 inizia a ricevere energia da SA2, che è un potenziometro collegato all'alimentatore di stabilizzazione IP1 e ruotato dal meccanismo di commutazione dell'alimentazione.
Al variare del diametro del perno si sposta lo slider del potenziometro SA2 e cambia il valore della tensione di controllo applicata ad SA1, quindi la velocità di avanzamento cambia al variare del diametro del perno. Il valore della velocità deve corrispondere alla pendenza del telaio della sega, la velocità è controllata commutando SA3.
Il sensore di inclinazione del telaio della sega SA3 è collegato ad un alimentatore stabilizzato IP2 tramite le resistenze R1 e R2. Il risultato è una sollecitazione proporzionale all'angolo di inclinazione del telaio della sega. Questa tensione viene confrontata con la tensione del motore M5, proporzionale alla velocità, prelevata dall'armatura del motore e alimentata al resistore R3 attraverso il blocco raddrizzatore VB, viene sottratta dalla tensione di uscita del sensore di inclinazione del telaio della sega.
Con il motore in retromarcia il blocco VB mantiene una polarità di riferimento costante. Il segnale di disadattamento viene inviato all'ingresso dell'amplificatore intermedio PU attraverso i resistori R4 - R6 e i contatti di chiusura KV3 (chiusi durante la regolazione automatica). Il segnale viene amplificato e inviato all'uscita PU, a cui sono collegati i relè KV7 e KV8. Vengono attivati in base alla polarità del segnale di ingresso errore.
Quindi, all'aumentare della velocità di avanzamento, la tensione rimossa dal motore aumenta e il valore del mismatch è negativo. In questo caso si interrompe il rapporto tra la velocità di avanzamento e l'inclinazione del telaio della sega. Il segnale di uscita amplificato dall'amplificatore PU include il relè KV7, i cui contatti di chiusura includono la bobina KM4.
I contatti di chiusura KM4 fanno "in avanti" il motore M2, aumentando l'inclinazione del telaio della sega.Allo stesso tempo, la tensione di uscita su SA3 viene aumentata spostando il cursore del potenziometro. Il segnale di deviazione inizia a diminuire fino a zero, dopodiché l'aumento dell'inclinazione del telaio della sega si interrompe. Ciò mantiene una corrispondenza tra la velocità di avanzamento e l'angolo del telaio della sega.
Il processo di controllo procede in modo simile con una diminuzione della velocità di avanzamento, ma il segnale di errore in questo caso ha segno positivo. Ciò provoca l'accensione del relè KV8, nonché l'inversione di KM5 e del motore M2. Quando la velocità di avanzamento diminuisce, diminuisce anche l'inclinazione del telaio della sega. Durante la regolazione, i contatti dell'azionamento KV7 e KV8 bypassano la resistenza R5, il che consente di forzare il processo.
All'inizio del taglio è necessario avere una velocità di taglio pari a non più del 30% della velocità di avanzamento di lavoro. Questo viene fatto nel modo seguente. Premendo il pulsante SB7, viene eccitato il relè KV6, i cui contatti vengono commutati sull'uscita SA1, in modo che una piccola tensione di controllo venga fornita attraverso il contatto di chiusura KV6 all'ingresso del convertitore a tiristori, che crea una bassa velocità di taglio .
Dopo la fine dell'avanzamento, il pulsante SB7 viene spento e il dispositivo entra in modalità di lavoro L'interruzione del sistema di controllo automatico dell'inclinazione del telaio della sega durante l'avanzamento viene fornita collegando il contatto di chiusura KV6 al circuito di alimentazione delle bobine di avviamento KM4 e KM5.