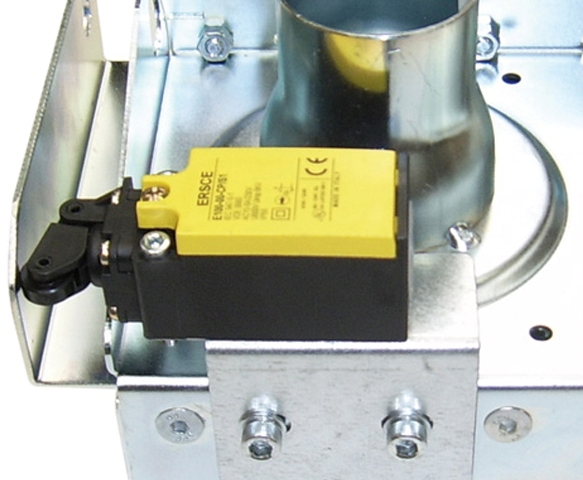
Confronto tra interruttori di corsa a contatto e senza contatto
Nell'automazione industriale, i circuiti sono ampiamente utilizzati interruttori e interruttori di corsa (posizione). design multipli progettati per controllare la posizione di vari meccanismi di produzione e basati sulla trasformazione del movimento di questi meccanismi in un segnale elettrico.
Gli interruttori di posizione possono anche essere utilizzati per eseguire funzioni diverse dal controllo della posizione dei meccanismi di produzione, ad esempio il controllo dell'angolo di rotazione, del livello, della pressione del peso, ecc.

Gli interruttori di direzione sono dispositivi ad azione discreta, che funzionano secondo il principio dell'aumento, cioè reagiscono solo a un cambiamento di posizione del meccanismo controllato. Il segnale di uscita degli interruttori di direzione è una funzione ambigua del movimento del meccanismo da una data posizione iniziale.
Tipi di scambi stradali
A seconda dei principi della commutazione posizionale, il metodo di commutazione è suddiviso in:
-
contatto meccanico realizzato con contatti in commutazione ed elementi sensibili al contatto;
-
contatto statico (magnetomeccanico), il cui elemento sensibile è senza contatto e l'elemento di commutazione è un contatto;
-
elementi statici senza contatto, sensibili e di commutazione da cui sono realizzati senza contatto.
Nella natura di contatto del nodo "commutazione - arresto", ovvero nella natura di contatto della connessione dell'elemento di guida (segnale di controllo in ingresso) con l'elemento sensibile, questo nodo è chiamato meccanico e in assenza di contatto - statico .
A seconda del design, gli interruttori possono essere combinati o separati. Nel primo caso, gli elementi sensibili e di commutazione sono posti in un unico alloggiamento e sono realizzati strutturalmente nel loro insieme. Nel secondo, l'elemento sensibile può essere posizionato a una distanza di diverse decine e centinaia di metri dall'interruttore.
La distorsione del campo magnetico dell'interruttore di percorso si ottiene modificando i parametri circuito magnetico elemento sensibile. I parametri variabili possono essere anche l'area della superficie attiva e la dimensione del traferro permeabilità magnetica circuito magnetico.
Attualmente il campo di applicazione degli interruttori di posizione a contatto meccanico nell'automazione industriale si sta restringendo e si pone il problema dell'inutilità di interruttori di posizione di questo tipo ai fini della realizzazione di sistemi di controllo automatico.
Quest'ultimo è causato da quanto segue:
-
La complessità della progettazione del gruppo interruttore-arresto, dovuta alla severità dei requisiti relativi ai limiti delle fluttuazioni consentite di un numero di parametri, che causa notevoli difficoltà nella sua fabbricazione e regolazione.
-
La criticità relativamente elevata delle caratteristiche di precisione di questo dispositivo all'influenza di fattori destabilizzanti (usura delle superfici di contatto, allentamento degli elementi di fissaggio, disallineamento degli elementi mobili, ecc.).
Una serie di soluzioni progettuali di meccanismi non possono essere implementate affatto sulla base di interruttori di contatto meccanici. Questi includono meccanismi che richiedono alti livelli consentiti di velocità e frequenza degli interruttori di movimento.
Se la velocità di funzionamento richiesta dell'interruttore stradale può essere ridotta a causa di ulteriori collegamenti cinematici del meccanismo, che, tra l'altro, deteriorano le caratteristiche di qualità del sistema di controllo (in particolare, i parametri di precisione), quindi la frequenza operativa consentita ( risoluzione) non può essere aumentata da complicazioni strutturali.
Guarda anche: Installazione di finecorsa e interruttori
In questo caso, qual è il motivo dell'uso diffuso del principio del contatto meccanico della commutazione di posizione? La risposta a questa domanda dovrebbe essere ricercata in due aspetti: nei principi esistenti di costruzione dei sistemi di controllo automatico e nei vantaggi del circuito di commutazione del percorso di contatto.
Vantaggi degli interruttori del percorso di contatto
Gli interruttori di contatto meccanici, solitamente realizzati con un'uscita multicircuito, sono caratterizzati dai seguenti vantaggi:
-
elevato rapporto di commutazione;
-
elevata potenza specifica di controllo (rapporto tra la potenza inclusa e l'ingombro);
-
universalità, ovvero la capacità di commutare circuiti sia in corrente continua che alternata;
-
ampia gamma di tensioni incluse;
-
consumo energetico interno trascurabile (piccolo valore di resistenza transitoria dei contatti nello stato chiuso);
-
bassa dipendenza della precisione e della stabilità del funzionamento dalle variazioni della potenza controllata.
Svantaggi degli interruttori del percorso di contatto
Il principio del contatto meccanico di questi dispositivi spesso non consente di soddisfare i maggiori requisiti di affidabilità, durata e precisione dei sistemi di automazione. Inoltre, gli interruttori di contatto meccanici sono molto sensibili agli effetti di vari fattori climatici (soprattutto alle basse temperature).
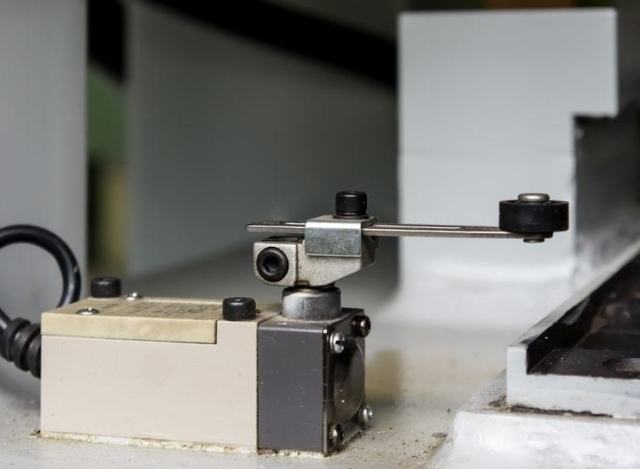
Gli interruttori di contatto meccanici sono caratterizzati da livelli limitati consentiti di velocità di movimento massima e minima dell'arresto di commutazione, che sono compresi nell'intervallo 0,3 - 30 m / min, e l'aumento della velocità dell'arresto di commutazione al di sopra del livello consentito porta a una forte diminuzione in durata meccanica sull'interruttore.
In tali interruttori, le deviazioni consentite della direzione di azione della forza di commutazione rispetto all'asse della leva sono molto piccole e il loro superamento porta a danni meccanici, specialmente negli interruttori con tirante anteriore.
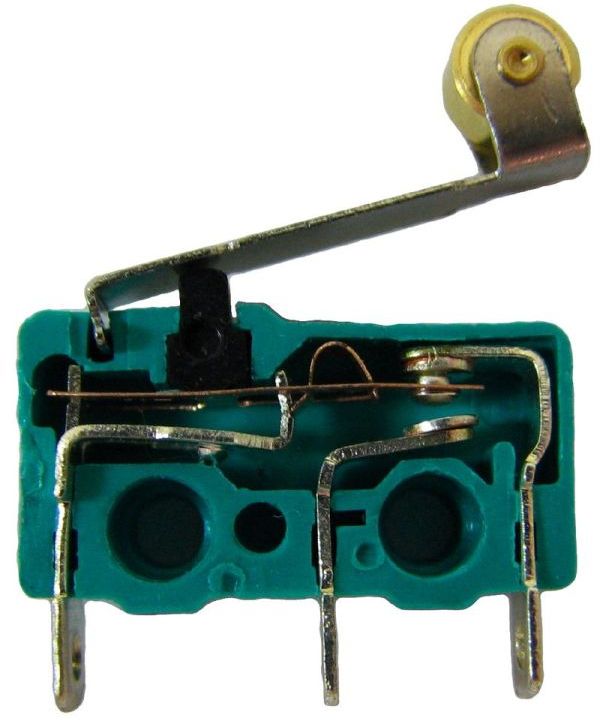
Per ottenere le caratteristiche di uscita del relè (caratteristiche di controllo), nella progettazione di tali interruttori sono previsti dispositivi a molla di scatto. Il grado richiesto di caratteristiche di uscita del relè viene ottenuto al costo di una significativa riduzione della durata dell'interruttore a causa delle grandi sollecitazioni dinamiche che si verificano nel grilletto al momento dell'attivazione.
Negli interruttori a contatto momentaneo meccanico, l'ampiezza del ciclo di isteresi (differenziale di corsa) della caratteristica di uscita raggiunge un valore significativo, che è del tutto inaccettabile per una serie di processi tecnologici a causa di un aumento improduttivo della durata del ciclo di elaborazione.
La riduzione della differenza nella corsa di questi deragliatori è correlata all'aumento della complessità del loro design o all'aumento delle loro dimensioni. Inoltre, in alcuni casi sono necessarie notevoli forze meccaniche per azionare interruttori di contatto meccanici.
Vantaggi e svantaggi degli interruttori di prossimità
Le circostanze sopra elencate portano alla necessità di realizzare dispositivi privi degli inconvenienti citati e al tempo stesso in grado di svolgere analoghe funzioni. Tali dispositivi sono interruttori di prossimità, i cui vantaggi includono:
-
durata significativa con elevata affidabilità e alta frequenza operativa consentita;
-
nessuna necessità di sforzo meccanico durante l'azionamento, bassa sensibilità a vibrazioni, accelerazioni, ecc.;
-
sensibilità insignificante dei parametri ai cambiamenti in una gamma relativamente ampia di condizioni esterne;
-
migliorare le condizioni dei servizi operativi.
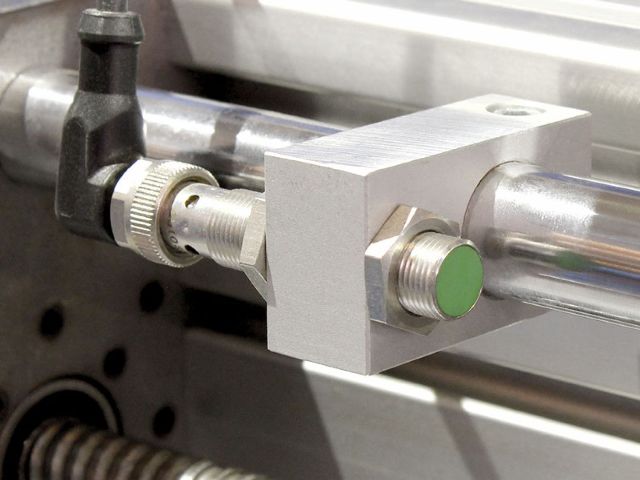
A causa del basso livello di retroazione dell'interruttore di prossimità, si ottiene una notevole semplificazione della costruzione dell'interruttore di arresto pur mantenendo un'elevata stabilità nel tempo delle caratteristiche di precisione. Inoltre, l'assenza di contatti elettrici e meccanici garantisce la sicurezza antincendio ed esplosiva di questi dispositivi, che amplia notevolmente l'area della loro possibile applicazione.
Uno degli svantaggi significativi degli interruttori di fine corsa senza contatto è la complessità dell'implementazione di molte modifiche progettuali facilmente implementabili negli interruttori di fine corsa a contatto meccanico.
Dispositivo interruttore di prossimità
Il principio di funzionamento degli interruttori di percorso statici senza contatto di tipo parametrico si basa sull'uso della distorsione del campo magnetico o elettrico creato dall'elemento sensibile quando un elemento di guida appare nella sua area, a seguito del quale uno stato sbilanciato si verifica nel circuito elettrico dell'interruttore e il dispositivo di uscita viene attivato.
Gli interruttori di prossimità statici sono spesso realizzati con un singolo circuito di uscita e in alcuni interruttori l'attivazione è accompagnata dalla comparsa di un segnale in uscita (effetto di commutazione diretta), in altri - dalla scomparsa (effetto di commutazione inversa), che è equivalente rispettivamente alla chiusura e all'apertura dei contatti delle piste di contatto meccanico.
Se è presente un elemento di amplificazione nel circuito dell'interruttore di prossimità in modalità relè, il parametro di uscita dell'elemento sensibile può essere in dipendenza funzionale continua del movimento controllato.
Attualmente vengono utilizzate numerose modifiche progettuali degli interruttori di corsa senza contatto, che differiscono per il livello di sensibilità (la dimensione dello spazio di lavoro), la posizione della fessura o il piano dell'elemento sensibile rispetto al piano di montaggio, la direzione di i fili conduttori, il numero di gradini dell'elemento sensibile (per esecuzione con cave), la profondità della cava, la lunghezza dei fili di collegamento, il livello della tensione di alimentazione, la natura della protezione contro gli influssi ambientali, ecc.
Le possibilità di utilizzo degli interruttori di movimento senza contatto sono determinate dai parametri delle loro caratteristiche elettriche e meccaniche.
I parametri elettrici includono:
- la natura del segnale di uscita e il numero di circuiti di uscita;
- consumo e potenza erogata;
- forma del segnale di uscita; coefficiente di commutazione per resistenza e tensione (per interruttori a trasformatore);
- caratteristiche temporali (tempi di trigger e rilascio) e frequenza di sparo (risoluzione);
- i livelli e la forma della tensione di alimentazione, nonché i limiti consentiti delle loro deviazioni.
I parametri delle prestazioni meccaniche includono:
- sensibilità (dimensione del gap di lavoro),
- dimensioni e dimensioni di connessione;
- caratteristiche di accuratezza (errore maggiore e addizionale) e differenziale di corsa;
- caratteristiche di installazione (tipi di freni di commutazione e modalità di installazione, livello di feedback, modalità di montaggio e installazione dell'interruttore);
- il livello di protezione dal rumore.
Per ulteriori informazioni sul dispositivo di commutazione di prossimità e sugli interruttori, vedere qui: Sensori senza contatto per la posizione dei meccanismi
Ivenski Yu. N.Interruttori di corsa senza contatto nell'automazione industriale