Sensori senza contatto per la posizione dei meccanismi
 In questo articolo parleremo dei sensori di posizione dei meccanismi. Fondamentalmente, la funzione principale di qualsiasi sensore è quella di dare un segnale quando si verifica un evento specifico. Cioè, quando si verifica un evento di trigger, il sensore si attiva e genera un segnale, che può essere analogico o discreto, digitale.
In questo articolo parleremo dei sensori di posizione dei meccanismi. Fondamentalmente, la funzione principale di qualsiasi sensore è quella di dare un segnale quando si verifica un evento specifico. Cioè, quando si verifica un evento di trigger, il sensore si attiva e genera un segnale, che può essere analogico o discreto, digitale.
I sensori di limite sono stati utilizzati come sensori di posizione per molti decenni. interruttori. Sono costituiti da contatti elettrici che si aprono o si chiudono meccanicamente quando una variabile (posizione) raggiunge un certo valore. Gli interruttori di fine corsa di vario tipo sono una parte importante di molti sistemi di controllo, la cui affidabilità dipende da essi. tali sensori contengono elementi meccanici in movimento le cui risorse sono limitate.
Gli interruttori di finecorsa vengono attualmente attivamente sostituiti da vari sensori di prossimità. Molto spesso sensori di prossimità dei seguenti tipi: induttivo, generatore, magnetohercon e fotoelettronica. Questi sensori non hanno alcun contatto meccanico con l'oggetto in movimento di cui si sta monitorando la posizione.
I sensori di posizione senza contatto garantiscono un'elevata velocità e un'elevata frequenza di accensione del meccanismo. Un certo svantaggio di questi sensori è la dipendenza, la loro accuratezza, dalle variazioni della tensione di alimentazione e della temperatura. A seconda dei requisiti, il dispositivo di output di questi dispositivi può essere il seguente elemento logico senza contattoE relè elettrico.
Negli schemi di frenatura di precisione degli azionamenti elettrici, i sensori di prossimità possono essere utilizzati sia per comandare una scalata che un arresto finale.
Esistono molti tipi di sensori oggi sul mercato, ma nell'ambito di questo articolo evidenzieremo l'argomento sensori di posizione direttamente induttivi, poiché in oltre l'80% dei casi sono i sensori induttivi a fungere da sensori per la posizione dei meccanismi.
Il sensore induttivo viene attivato quando il metallo si avvicina alla sua zona di attivazione. Per questo motivo i sensori di posizione induttivi sono anche chiamati sensori di presenza, sensori di prossimità o semplicemente interruttori induttivi.
Consideriamo ora il principio di funzionamento di un sensore induttivo. Come accennato in precedenza, quando il metallo è abbastanza vicino alla zona di attivazione, il sensore viene attivato. Questo fenomeno consiste nell'interazione dei soggetti coinvolti induttori con l'avvicinarsi del metallo, che cambia bruscamente l'entità del campo magnetico della bobina, che porta all'attivazione del sensore, viene attivato, il segnale corrispondente appare alla sua uscita.
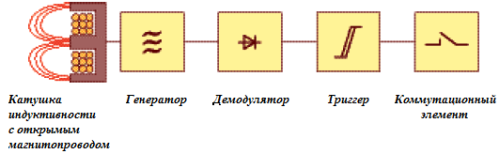
La parte elettronica del dispositivo contiene un circuito di controllo, che a sua volta controlla un relè o un interruttore a transistor. Consiste delle seguenti parti:
-
Un generatore che crea un campo elettromagnetico necessario per interagire con un oggetto.
-
Trigger di Schmitt che fornisce l'isteresi di commutazione.
-
Un amplificatore per aumentare l'ampiezza del segnale in modo che raggiunga il valore di attuazione richiesto.
-
Indicatore LED che informa sullo stato dell'interruttore. Fornisce inoltre il monitoraggio e la configurazione delle prestazioni.
-
Composto per la protezione contro la penetrazione di particelle solide e acqua.
-
Alloggiamento per il montaggio del sensore e protezione da varie influenze meccaniche È realizzato in ottone o poliammide ed è rifinito con elementi di fissaggio.
I sensori di posizione induttivi trovano largo impiego nei sistemi di automazione industriale dove è necessario determinare periodicamente o costantemente la posizione di qualsiasi parte del meccanismo. Il sensore genera un segnale che viene inviato all'azionamento. Un dispositivo di avviamento, controller, relè, convertitore di frequenza, ecc. può fungere da meccanismo esecutivo. La cosa principale è che i parametri del sensore corrispondono ai parametri dell'azionamento in termini di tensione e corrente.
La maggior parte dei sensori non sono dispositivi di potenza, sono principalmente dispositivi di segnalazione, quindi il sensore stesso, di regola, non commuta nulla di potente, ma controlla solo, fornisce un segnale di controllo, funge da dispositivo di avvio dell'azione che può già essere collegato alla commutazione di potenza.
I moderni sensori di posizione induttivi si trovano più spesso in due versioni di custodie in plastica o metallo: rettangolari o cilindriche. Il diametro del sensore a sezione circolare può variare da 4 a 30 mm, ma i diametri più comunemente usati sono 18 e 12 mm.
Quando il sensore è montato sull'apparecchiatura, viene impostato uno spazio tra la piastra metallica e la zona di attivazione del sensore, solitamente questa distanza non supera il diametro del sensore e, di norma, risulta essere 2-3 volte inferiore a suo diametro.
In base al metodo di connessione, i sensori di posizione induttivi possono essere a due fili, tre fili, quattro fili e cinque fili.
A due fili commutare direttamente il carico, come ad esempio bobina di avviamento, ovvero funzionano come un interruttore convenzionale. I sensori a due fili richiedono resistenza al carico, quindi non sono sempre adatti come strumento affidabile, ma non perdono la loro rilevanza.
Il carico è semplicemente collegato in serie con il sensore, se si utilizza una tensione costante, è importante osservare la polarità, se la polarità alternata non è importante, l'importante è la potenza e la corrente commutate.
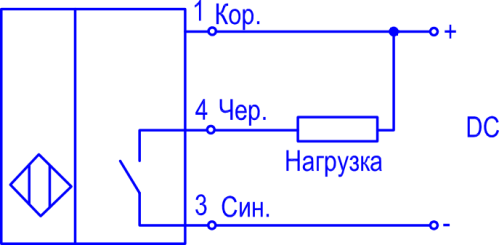
I sensori a tre fili hanno un terzo filo per alimentare il sensore stesso, e questa è la soluzione più diffusa. I sensori a quattro e cinque fili hanno uscite a transistor o relè per il collegamento del carico e il quinto filo consente di selezionare la modalità operativa del sensore, lo stato iniziale delle uscite.
Poiché le uscite possono essere sia a relè che a transistor, i sensori sono di conseguenza suddivisi in tre tipologie a seconda del dispositivo delle uscite: relè, npn e pnp.
Sensori con uscita a relè
Un sensore con un'uscita a relè ha l'isolamento galvanico del circuito di alimentazione dal circuito incluso. Commuta un filo e la tensione nel circuito commutato non è particolarmente critica. Poiché il circuito di alimentazione del sensore è isolato galvanicamente, questo può essere considerato un vantaggio del sensore a relè. I sensori di questo tipo sono generalmente grandi.
Sensori con uscita a transistor pnp
Il sensore ha in uscita un transistor pnp che commuta il filo positivo con il carico. Un carico è collegato al circuito del collettore del transistor pnp di uscita, che è permanentemente collegato al negativo attraverso il suo secondo conduttore.
Sensori con uscita a transistor npn
Il sensore ha in uscita un transistor NPN che commuta il filo negativo con il carico. Un carico è collegato al circuito del collettore del transistor npn di uscita, che è collegato in modo permanente dal suo secondo conduttore al conduttore positivo.
In base allo stato iniziale delle uscite, i sensori di posizione induttivi possono essere contatti normalmente chiusi o normalmente aperti. Lo stato iniziale significa che questo stato è nel momento in cui il sensore non è ancora attivato, cioè non è attivato.
Se i contatti di uscita sono normalmente chiusi, il carico è collegato al minimo, se è normalmente aperto, fino a quando il sensore non viene attivato, il carico verrà interrotto e non verrà fornita alimentazione all'azionamento (ad es. contattore). I contatti normalmente chiusi sono designati in formato inglese - N.C. (Normalmente Chiuso), Normalmente Aperto — N.A. (Normalmente aperto).
Pertanto, i sensori con uscite a transistor sono di quattro tipi: due tipi in base alla conducibilità (pnp o npn) e due tipi in base allo stato iniziale delle uscite. Potrebbe anche verificarsi un ritardo durante l'accensione o lo spegnimento.

A seconda del tipo di azionamento collegato al sensore, nonché del metodo di alimentazione, la logica del sensore può essere positiva o negativa. Ciò è dovuto al livello di tensione che attiva l'ingresso del dispositivo.
Se l'ingresso viene attivato quando il filo negativo dell'attuatore è collegato a terra, al meno, allora la logica viene chiamata negativa, tale connessione è caratteristica dei sensori con uscite a transistor di tipo npn.
La logica positiva corrisponde al collegamento del filo positivo del drive all'alimentazione positiva quando attivata, questa logica è tipica dei sensori con uscite a transistor pnp. Molto spesso esiste una logica positiva nel funzionamento dei sensori induttivi per la posizione dei meccanismi.
Tipi di sensori di posizione induttivi più vecchi e più comunemente usati
Sensori di posizione induttivi IKV-22
Sensori induttivi IKV-22. Il funzionamento di questi sensori si basa sul principio di modificare la resistenza induttiva delle bobine con anima in acciaio quando cambia il traferro nel circuito magnetico.
Un circuito magnetico con due bobine è montato su una piastra di acciaio, chiusa con un coperchio di plastica. Due condensatori MBGP (uno con una capacità di 15 μF, 200 V, l'altro con una capacità di 10 μF, 400 V) sono fissati alla piastra dal lato inferiore. I condensatori sono coperti da una copertura. Il cavo è collegato attraverso la guarnizione. Sul meccanismo è installato uno shunt magnetico, le cui dimensioni devono essere almeno: spessore 2 mm, larghezza 80 mm, lunghezza 140 mm. Il traferro tra il circuito magnetico e lo shunt è di 6 ± 4 mm.
Il relè di uscita viene solitamente attivato e disattivato nel momento in cui lo shunt magnetico passa attraverso il sensore, quando a causa di una variazione della resistenza induttiva della bobina, si verifica una risonanza di corrente e la corrente attraverso la bobina del relè diminuisce. Questi relè: tipo MKU-48, 12 V CA, corrente di assorbimento non superiore a 0,45 A, corrente di caduta non inferiore a 0,1 A.La tensione di alimentazione del circuito del sensore è un relè a 24 V CA.
Sensori di posizione induttivi ID-5
Nelle officine metallurgiche vengono utilizzati sensori induttivi del tipo ID-5, progettati per funzionare a temperature ambiente fino a + 80 ° C e umidità fino al 100%. La polvere conduttiva e le incrostazioni sono accettabili. Con il sensore viene utilizzato un amplificatore di uscita a semiconduttore di tipo UID-10. La potenza di uscita dell'amplificatore (25 W) è sufficiente per accendere i diffusi relè REV-800, contattori KP21, MK-1, ecc.
Il traferro tra il sensore e l'oggetto ferromagnetico osservato può essere fino a 30 mm. Le dimensioni del sensore ID-5 sono 187x170x70 mm, la tensione di alimentazione è 220 V ± 15%, 50 Hz.
Interruttori senza contatto BSP di piccole dimensioni
I piccoli interruttori di movimento BSP-2 (con uscita senza contatto, a elemento logico) e BRP (con uscita a relè PE-21, 24 V, 16 Ohm) vengono utilizzati su macchine per il taglio dei metalli.
L'interruttore BSP-2 è costituito da un sensore trasformatore differenziale e un trigger a semiconduttore. Il sistema magnetico della prima bobina del sensore è mosso da una piastra d'acciaio e la seconda bobina è manipolata mentre si sposta sul suo sistema magnetico collegato al meccanismo dell'armatura piatta. Le bobine sono accese nella direzione opposta.
Se l'armatura è sopra il sensore, le reattanze induttive delle bobine sono uguali e l'uscita del sensore del trasformatore differenziale è zero. In questo caso, all'uscita del trigger appare una tensione di almeno 2,5 V, sufficiente per il funzionamento dell'elemento logico.
In assenza di un'armatura sopra il sensore, viene applicata una tensione al grilletto, che lo riporta allo stato originale. Quindi il segnale di uscita dell'interruttore è zero.
Il principio di funzionamento dell'interruttore BRP è per molti versi simile a quello del BSP-2: all'interno della scatola sono installati un sensore induttivo (secondo il circuito del trasformatore differenziale), un trigger e un amplificatore. Le bobine secondarie con un diverso numero di spire vengono accese nella direzione opposta. Poiché l'armatura si sovrappone al sistema magnetico del sensore, il segnale diminuisce e dopo aver cambiato la fase, il trigger viene commutato e viene attivato un relè di uscita esterno (PE-21, 24 V, 16 Ohm).
L'ancora fissata al meccanismo ha dimensioni di 80x15x3 mm. La distanza tra l'ancoraggio e il sensore è di 4 mm. La precisione degli interruttori nella modalità nominale è ± 0,5 mm, il differenziale di azionamento non è superiore a 5 mm. A. fluttuazioni della tensione di alimentazione e della temperatura, l'errore degli interruttori BSP-2 e BRP può raggiungere ± (2,5-f-3,0) mm.
Sensori induttivi ad alta frequenza VKB
I sensori induttivi ad alta precisione del tipo VKB con armatura a forma di U o piatta vengono utilizzati anche per l'automazione delle macchine per il taglio dei metalli. I poli del trasformatore integrato formano un sistema elettromagnetico aperto. Il traferro di lavoro è di 0,1-0,15 mm.
La tensione di uscita dall'avvolgimento secondario del trasformatore viene inviata a un circuito di misurazione differenziale e quindi a un amplificatore a transistor. L'errore totale del sensore con fluttuazioni di temperatura da 5 a 40 ° C e tensione dall'85 al 110% del valore nominale è ± (0,064-0,15) mm, la differenza di risposta non supera 0,4 mm. La velocità massima di movimento del meccanismo è di 10 m/mm. Dimensioni sensore 62x34x24 mm. Tensione di alimentazione 12 V.
Tipi speciali di sensori induttivi di precisione per macchine per il taglio dei metalli con un circuito differenziale hanno un errore inferiore a ± 0,01 mm.Tali sensori includono un interruttore di movimento senza contatto del tipo VPB12, costituito da un'unità sensore su un'unità elettronica. L'unità sensore include un sensore di lavoro induttivo, un sensore di compensazione induttivo e circuiti stampati. Il meccanismo è montato: elemento di ferrite di controllo. Tensione di alimentazione 12 V CC. La distanza massima di esposizione non è superiore a 0,12 mm. All'uscita del sensore può essere collegato un relè di tipo RPU-0. La corrente di carico massima del dispositivo di uscita è 0,16 A.
Sensori di posizione del generatore
I sensori di questo tipo sono compatti e molto precisi. I generatori di sensori delle serie KVD-6M e KVD-25 (con slot), KVP-8 e KVP-16 (aeromobili) si sono dimostrati efficaci. Sono adatti per l'uso in presenza di elevate concentrazioni di umidità e polvere. Gli elementi del circuito a transistor del sensore (generatore e trigger) si trovano in un alloggiamento in polistirolo resistente agli urti. La sigillatura viene eseguita con un composto indurente a freddo. L'intervallo di temperatura di esercizio va da — 30 a +50 ° C.
Il sensore HPC genera un segnale discreto quando una piastra metallica («flag») passa attraverso lo slot, causando un'interruzione nella generazione e commutazione del trigger. La larghezza della fessura è di 6 mm per il sensore KVD-6M e di 25 mm per il sensore KVD-25.
I sensori KVP-8 e KVP-16 si attivano al passaggio di una piastra metallica a una distanza massima rispettivamente di 8 e 16 mm.