Nodi di circuiti automatici di controllo in funzione del tempo
 Elettromagnetico, elettronico, motoristico ed elettropneumatico sono ampiamente utilizzati nei circuiti di automazione. relè a tempo... Gli schemi di conversione della durata del segnale più comuni sono mostrati in fig. 1. Schema fig. 1, e fornisce un impulso di una certa durata, indipendentemente dalla durata della pressione pulsanti SB. Dopo aver premuto il pulsante SB, viene attivato il relè K, che dà un impulso per accendere il meccanismo. La durata dell'impulso è determinata dal ritardo temporale del relè KT. Il pulsante SB può essere sostituito con un relè di comando KQ.
Elettromagnetico, elettronico, motoristico ed elettropneumatico sono ampiamente utilizzati nei circuiti di automazione. relè a tempo... Gli schemi di conversione della durata del segnale più comuni sono mostrati in fig. 1. Schema fig. 1, e fornisce un impulso di una certa durata, indipendentemente dalla durata della pressione pulsanti SB. Dopo aver premuto il pulsante SB, viene attivato il relè K, che dà un impulso per accendere il meccanismo. La durata dell'impulso è determinata dal ritardo temporale del relè KT. Il pulsante SB può essere sostituito con un relè di comando KQ.
Diagrammi Fig. 8, b (con relè temporizzato elettromagnetico) e fig. 1, c (con relè a tempo elettropneumatico o motorizzato) vengono utilizzati per fornire un impulso di breve durata dopo l'inizio dell'azione dell'interruttore di corsa SQ. In questi e nei successivi schemi, invece dei contatti interruttore di movimento È possibile utilizzare contatti relè KQ.
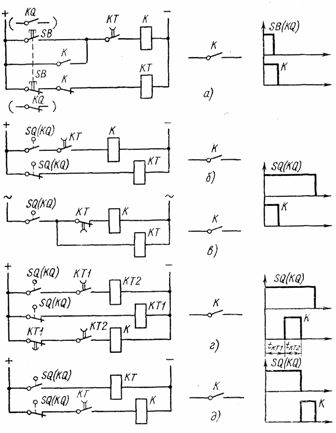
Riso. 1. Circuiti per convertire la durata dei segnali
Schema fig.1d fornisce un impulso di durata tKT2 con un ritardo di tempo tKT1 dopo l'inizio dell'azione dell'interruttore SQ.
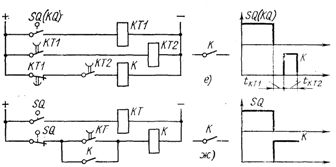
Il nodo circuitale Fig. 1, e.Se è richiesto un ritardo tKT1 prima che questo impulso venga applicato, il circuito in fig. 1, e. La durata dell'impulso è tKT2.
Nei circuiti di controllo posizionale, il circuito di Fig. 1g, che svolge la funzione di emettere un comando lungo dopo la fine dell'impatto sull'interruttore di scatto SQ. Il comando viene annullato all'inizio di una nuova azione sull'interruttore SQ.
È possibile ottenere un breve ritardo (fino a 1,5 s) accendendo e spegnendo in modo convenzionale relè intermedi a causa dello shunt delle loro bobine con condensatori o diodi.
Nello schema di fig. 2, e quando il contatto KQ è chiuso, il relè K si attiva con un ritardo determinato dal tempo di carica del condensatore C. Quando KQ è chiuso, anche il relè K ritorna con un ritardo dovuto alla scarica del condensatore.

Riso. 2. Ottenere ritardi di tempo smistando le bobine dei relè intermedi con condensatori o diodi
Per ottenere una temporizzazione solo quando il relè è attivo, utilizzare il circuito di Fig. 2, b. Il ritardo quando il relè è spento è praticamente assente, poiché il condensatore si scarica rapidamente al resistore R (la resistenza del resistore R è significativamente inferiore alla resistenza della bobina del relè K). Un problema simile è risolto dal circuito di fig. 2c, che utilizza un contatto di apertura del relè KQ. Lo svantaggio di questo circuito è la significativa perdita di energia attraverso il resistore in assenza di segnale.
Lo schema in fig. 2d, dove quando il contatto KQ si apre, il relè K si spegne con un ritardo controllato dal resistore R.
Secondo lo schema di fig. 2, e viene creata una temporizzazione quando K è spento dopo la chiusura del contatto del relè di comando KQ.
Se è richiesto un leggero ritardo nel ritorno del relè K all'attivazione del relè di comando KQ, il diagramma di fig. 2, e, in cui la bobina del relè K è deviata da un diodo.
Lo schema per la generazione di impulsi di una data durata e duty cycle è mostrato in fig. 3, un. La durata dell'impulso è determinata dal tempo di ritardo del relè KT2, la pausa è determinata dal tempo di ritardo del relè KT1.
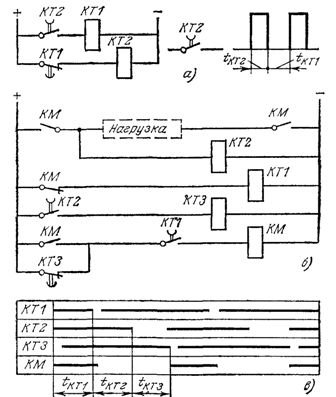
Riso. 3. Circuiti a relè per la generazione di impulsi
Nella fig. 3, b, viene fornito un diagramma dell'accensione periodica del meccanismo con un tempo di pausa prolungato Il tempo di accensione del contattore KM è uguale al ritardo del relè KT1, la durata della pausa è la somma dei ritardi dei relè KT2 e KTZ. Il diagramma di temporizzazione è mostrato in Fig. 3, c.
Schemi di generatori di impulsi di relè temporali o elementi logici (vedi sotto) sono utilizzati anche per regolare la velocità di funzionamento dei meccanismi lineari. Si diffuse anche il regolatore di temperatura, contenente un dispositivo di comando KEP-12U, per molti versi simile a un relè di temporizzazione del motore. L'unità ha un motore esecutivo, ingranaggi variabili, tamburo a camme, interruttore e 12 contatti.
I regolatori di velocità di solito utilizzano lo schema per il funzionamento ciclico del dispositivo KEP-12U (Fig. 4, a). Il circuito è realizzato utilizzando i relè K1 e K2 ei contatti del dispositivo di comando KT.1 e KT.2, il cui schema elettrico è riportato in fig. 4, b.
Prima di iniziare il lavoro, accendere l'interruttore S.Quando il contatto del relè KQ viene brevemente chiuso, dando un comando per avviare il ciclo di lavoro, il relè K1 viene eccitato e si autoblocca. Il relè K2 viene attivato accendendo il dispositivo di comando KT. Gli avvolgimenti del motore LM1 e LM2 vengono eccitati e il tamburo della camma inizia a ruotare. I contatti di uscita del dispositivo KT.3, KT.4, ecc., chiudendosi in sequenza, nei momenti prestabiliti (vedere lo schema in Fig. 4, b) danno comandi per accendere i meccanismi lineari. A metà del ciclo, il contatto KT.1 si apre e il relè K1 si spegne.
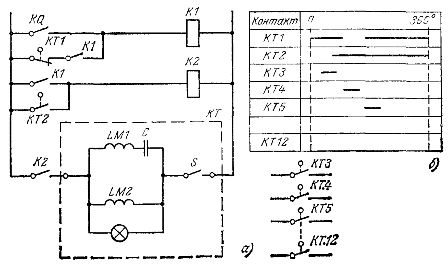
Figura 4. Regolatore di velocità di linea con il dispositivo KEP-12U
La bobina del relè K2 supporta l'alimentazione attraverso il contatto del dispositivo KT.2. Dopo aver ruotato il tamburo di un angolo di 360 °, il contatto KT.2 si apre, il motore del dispositivo KEP-12U si arresta. La catena è pronta per il ciclo successivo.
In conclusione, considereremo due schemi per il controllo remoto del ritardo dei relè temporizzati elettromagnetici.
Per modificare il ritardo dal pannello di controllo, è possibile utilizzare un circuito relè a due bobine con bobine di attivazione KT.1 e bobine di ritorno KT. 2 (smagnetizzazione), i cui MDS sono diretti in modo opposto (Fig. 5, a). L'MDS della bobina di rilascio viene regolato utilizzando il potenziometro RP. Per evitare il funzionamento ripetuto del TA dopo il ritorno e l'intervento dell'inversione di magnetizzazione, la MDS della bobina di sgancio deve essere inferiore alla MDS sufficiente per tirare l'armatura, oppure deve essere introdotto un proprio contatto di chiusura del relè nella bobina del circuito (Fig. 5, a).
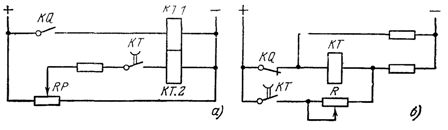
Figura 5. Schemi per la regolazione remota del tempo di ritardo del relè
Secondo lo schema di fig.5, b modificare a distanza la temporizzazione di un relè a bobina singola. Quando il contatto KQ si apre, la bobina del relè KT scorre con una corrente di smagnetizzazione che è regolata dal resistore R. All'aumentare della corrente di smagnetizzazione, il ritardo del relè diminuisce e viceversa. Con una tensione di alimentazione di 220 V, viene utilizzato un relè con una bobina per una tensione nominale di 110 V.