Circuiti di controllo dell'azionamento elettrico
 A seconda della velocità degli ascensori per passeggeri, vengono adottati i seguenti tipi di circuiti di controllo della potenza:
A seconda della velocità degli ascensori per passeggeri, vengono adottati i seguenti tipi di circuiti di controllo della potenza:
-
gli ascensori a bassa velocità hanno motori a gabbia di scoiattolo o a rotore di fase e un pulsante o un comando a leva,
-
ascensori ad alta velocità - motori a due o una velocità controllati da stazioni magnetiche o stazioni di controllo a tiristori (TSU-R) con pulsanti di controllo,
-
ascensori ad alta velocità e ad alta velocità - motori in corrente continua comandati dal sistema "generatore - motore" con diversi schemi di eccitazione o dal sistema "convertitore a tiristori - motore" con pulsanti,
-
possono essere utilizzate anche catene di cascate di valvole asincrone (AVK), il cui utilizzo consente di aumentare l'efficienza. installazione.
Gli ascensori per passeggeri, a seconda del flusso di passeggeri, dell'altezza di sollevamento e del numero di ascensori che servono i passeggeri, sono suddivisi in controllo singolo e di gruppo.
I singoli includono:
a) ascensori funzionanti su ordini singoli e chiamate senza fermate di attraversamento durante la discesa e la salita dei passeggeri,
b) ascensori con imbarco passeggeri in discesa, ma con divieto di chiamata in salita,
c) lo stesso, ma con registrazione delle chiamate in discesa con la loro successiva esecuzione.
Gli ascensori azionati da gruppi includono:
a) ascensori con un pulsante per chiamare i punti di atterraggio, indipendentemente dal numero di ascensori installati (il doppio controllo è più spesso utilizzato) e con l'imbarco dei passeggeri durante la discesa,
b) lo stesso, ma con la raccolta completa dei passeggeri ai piani intermedi per l'imbarco e lo sbarco (di solito installati in edifici amministrativi, scolastici e di altro tipo).
Inoltre, è molto comune inviare ascensori a più case e interi quartieri, quando lo stato dei circuiti viene monitorato da una console di spedizione e vengono controllati diversi ascensori.
Indipendentemente dalla velocità degli ascensori, dal loro controllo singolo o di gruppo, gli elementi necessari della maggior parte dei loro schemi sono i seguenti:
-
pulsanti a regolazione automatica, pulsanti appiccicosi o di chiusura per chiamare i taxi e dare un ordine dalla cabina,
-
vari sensori di selezione e precisi dispositivi di corrispondenza delle battute per registrare la posizione della cabina e lo stato dei circuiti elettrici,
-
sensori e interblocchi per lo stato delle funi di sollevamento, lo stato della miniera e porte di cabina (aperte o chiuse),
-
finecorsa per limitare la velocità e il grado di carico della cabina,
-
indicatori del senso di marcia della cabina e, in alcuni ascensori, della presenza di un carico in cabina.
Di questi articoli, ci soffermeremo più in dettaglio sui dispositivi di corrispondenza della posizione (PSC), che determinano il luogo in cui il vagone della miniera deve fermarsi quando si verifica una chiamata o un ordine e il suo movimento verso l'alto o verso il basso.Gli articoli rimanenti sono solitamente varie modifiche di finecorsa noti da altri corsi.
Strutturalmente, i dispositivi di adattamento della posizione sono implementati sotto forma di una serie di sensori elettromeccanici o induttivi o magnetici (reed) a tre posizioni situati nelle miniere, con segnali inviati a un relè o a un selettore senza contatto nella sala macchine (i CCP sono talvolta implementati sotto forma di unità a pavimento centrale situate nella sala macchine) …
I sensori posizionati in miniera interagiscono con i derivatori montati in cabina (per elettromeccanici) o magnetici (per interruttori induttivi o reed) e inviano segnali alla centralina di piano (step copier o relay relay) installata in sala macchine, e al quest'ultimo trasmette e un circuito di controllo — un segnale per eseguire il comando ricevuto.
È più opportuno posizionare i sensori per i segnali di movimento dell'auto sopra o sotto l'auto (sono necessari meno fili) e installare shunt magnetici nelle miniere nei punti necessari. In questo caso, con controllo digitale, il numero di colonne con derivazioni installate lungo il vano è pari al numero di bit del numero di piano trasmesso in codice binario o altro.
Gli interruttori elettromeccanici a tre posizioni vengono spostati in una delle posizioni corrispondenti al movimento di salita o discesa della cabina, o al suo arresto, mediante una disposizione a ricciolo.In questo caso, quando la cabina è in movimento, i contatti degli interruttori ai piani transitati vengono accesi su una delle posizioni di fine corsa, preparandosi all'azione della catena di chiamate e ordini, e quando la cabina si ferma, l'interruttore viene spostato in posizione intermedia, spegnendo il circuito di comando dei teleruttori direzionali ed escludendo così la cabina dall'uscita dal piano in caso di pressione errata del pulsante di comando o di chiamata.
Al fine di garantire una frenatura relativamente accurata della cabina dell'ascensore, recentemente nei loro circuiti di controllo hanno iniziato a essere utilizzati sensori induttivi senza contatto o a controllo magnetico (reed) sigillati a contatto. Questi sensori sono installati sia in miniera che in cabina: nella miniera sono presenti sensori per la selezione (decelerazione), e in cabina è presente un sensore per l'arresto preciso. Per interfacciarsi con i sensori, uno shunt selettivo magnetico lanterna è posizionato sulla cabina di pilotaggio e shunt ferromagnetici di precisione sono posizionati nel vano (su ogni piano).
I sensori induttivi sono costituiti da un circuito magnetico aperto a forma di U con una bobina racchiusa in un alloggiamento. L'avvolgimento del relè esecutivo è collegato in serie con esso e ad esso viene applicata una tensione di corrente alternata (U).
Con un circuito magnetico aperto, il flusso magnetico che attraversa la bobina è piccolo. Da qui la f.e.m. e la corrente di autoinduzione nei fili della bobina, così come la resistenza induttiva (X) da essa causata, sono praticamente assenti, quindi la resistenza della bobina è attiva (R). La corrente nelle bobine collegate in serie è relativamente grande; imita la chiusura dei contatti nel sistema di contatto (il relè si accende).
Quando lo shunt chiude il circuito magnetico a forma di U, il flusso magnetico che attraversa la sua bobina aumenta e quindi aumenta la fem. autoinduttanza così come la resistenza induttiva della bobina dovuta ad essa. Di conseguenza, la corrente nelle bobine collegate in serie diminuisce, simulando l'apertura del circuito nel sistema di contatto (il relè esecutivo viene disattivato).
L'interruttore reed è un corpo a forma di U in cui su un lato della scanalatura sono poste due boccette di vetro sigillate con all'interno un vuoto e contatti fissati su piastrine a molla che sono collegate ai rispettivi circuiti di controllo dell'elevatore. Dall'altro lato dello slot c'è un magnete permanente. L'elemento di lavoro di tali sensori è uno shunt ferromagnetico che passa attraverso il taglio a forma di U quando la cabina dell'ascensore si muove.
Il principio di funzionamento di questi sensori è il seguente: le forze della molla delle piastre di contatto degli interruttori reed sono dirette in modo tale che se il campo di un magnete permanente non agisce su di esse, i contatti normalmente aperti sono aperti e normalmente i contatti chiusi sono chiusi, ad es. i circuiti a cui sono collegati questi contatti verranno aperti o chiusi.
Questa condizione dell'interruttore reed si verificherà quando lo shunt ferromagnetico si trova nella scanalatura di un corpo a forma di U, perché le linee del campo magnetico del magnete permanente sono chiuse attraverso lo shunt.Una volta che lo shunt esce dalla scanalatura, le linee del campo magnetico sono chiuse attraverso le piastre, vincendo la loro azione elastica, ed i contatti dell'interruttore reed, e quindi i circuiti ai quali sono collegati, vanno nello stato opposto.

Come esempio che riflette le caratteristiche principali degli schemi di controllo degli ascensori, si consideri lo schema di controllo per un singolo ascensore senza fermate associate mostrato in Fig. 1. L'ascensore serve quattro piani; come motore esecutivo viene utilizzato un motore asincrono M a due velocità.
L'inclusione dei giri del motore bassi (Ml) o alti (B) viene effettuata dai corrispondenti contattori Ml e B. Il senso di rotazione del motore è determinato dai contattori B e H, decelerazione - da un resistore aggiuntivo P, arresto - mediante freno elettromagnetico ET.
Utilizzato come interruttori da pavimento sensori induttivi senza contatto (DTS, DTOV e DTON) collegati in serie alle bobine del relè (RIS, RITOV, RITON). I sensori TTP sono utilizzati per attivare l'azionamento dell'ascensore ad alta velocità e dare un impulso di rallentamento, mentre i sensori DTOV e DTON sono progettati per arrestare precisamente l'ascensore al livello del piano corrispondente e sono posizionati sulla cabina, shunt magnetici per loro sono installati nell'albero dell'albero.
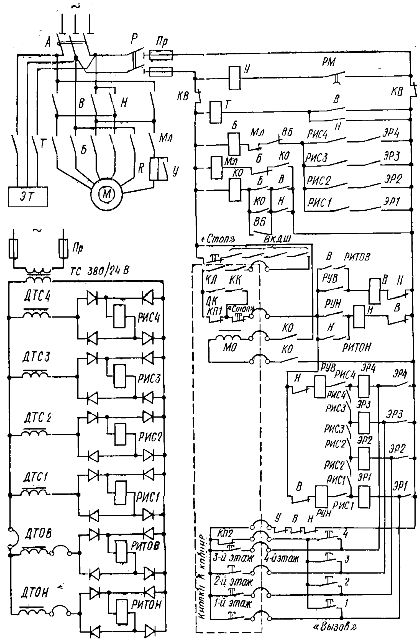
Riso. 1. Diagramma schematico di un singolo controllo dell'ascensore
Consideriamo lo scopo dei restanti elementi del circuito e il suo funzionamento utilizzando l'esempio di spostare una cabina con un passeggero dal 1° al 3° piano, supponendo che la macchina automatica A, il sezionatore P e i finecorsa KB che limitano il movimento di salita e discesa della cabina in modalità di emergenza, sono chiusi e la cabina si trova al piano terra. In questo caso le bobine del relè RIS, oltre al relè del primo piano, scorrono dalla corrente nominale.
Quando si preme il pulsante «3° piano», si forma il seguente circuito elettrico: fase di rete — polo del sezionatore P — fusibile Pr — finecorsa KB — pulsante «Stop» — blocco delle porte della miniera D1 — D4 — contatti per il tensionamento la fune KK — finecorsa di sicurezza KL — interruttori porta cabina DK — contatti del pulsante «Stop» — blocco di apertura -contatto Í — bobina relè RUV — contatti di chiusura dei relè RIS4 e RISZ (le bobine di questi relè portano corrente) — bobina del relè di piano ERZ — pulsante «3° piano» — blocchi di apertura — contatti dei contattori U, B, N — finecorsa KB — fusibile R — sezionatore polo P — fase di rete.
Dopo l'attivazione del relè RUV e ER3, il contattore di marcia avanti B, il contattore di corsa rapida B (sul circuito della bobina B - contatto di blocco ML - interruttore ad alta velocità VB - contatti relè RISZ e ER3) vengono attivati. Quando i contatti B e B sono chiusi, il motore è collegato alla rete, il contattore T, la puleggia di sgancio e il contattore di lancio KO, che accende il solenoide di lancio MO e prepara il circuito della bobina del contattore di bassa velocità Ml, sono acceso. La corsa rientra, rilasciando la leva di bloccaggio e la cabina inizia a muoversi.
Quando la cabina si avvicina al terzo piano, lo shunt ferromagnetico chiude la bobina del sensore TTSZ, la sua resistenza aumenta e il relè RISZ scompare, spegnendo i relè ER3 e RUV. Di conseguenza, il contattore B scompare, chiudendo il suo contatto, accende il contattore di bassa velocità Ml e il contattore B rimane acceso, perché quando l'auto è in movimento, il circuito magnetico del sensore di frenata preciso non è ancora chiuso, quindi il Contatto RITOV ancora non ancora aperto.Il motore viene arrestato a bassa velocità operando in modalità generatore con un resistore R. introdotto in una fase dello statore.
Non appena il pavimento della cabina è allineato con il pavimento del pavimento, lo shunt magnetico chiude il circuito magnetico della bobina del sensore di arresto esatto DTOV, il relè RITOV scompare e i teleruttori B, poi KO e infine ML vengono accesi Di conseguenza, l'elettromagnete del motore e il freno vengono scollegati dalla rete, il freno meccanico viene inserito e la cabina viene arrestata.
Imparare uno schema collettivo per controllare gli ascensori con fermate di passaggio solo quando si abbassa la cabina o uno schema completamente collettivo, ad es. quando il passaggio si ferma mentre l'auto si muove su e giù, è necessario in uno schema simile a quello discusso in fig. 1, introducono alcune aggiunte. Ad esempio, in un circuito motore a due velocità, i sensori induttivi ID, il relè RIS e i pulsanti di chiamata e ordine su ogni piano sono inclusi come mostrato in Fig. 2.
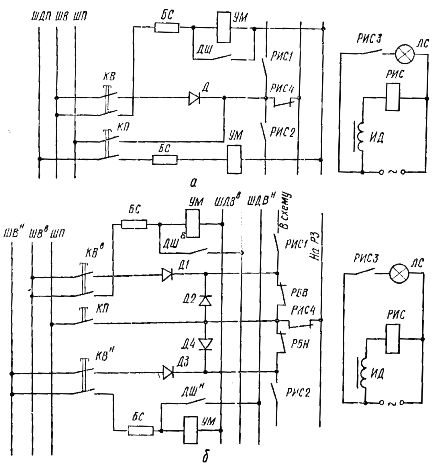
Riso. 2. Frammenti di aggiunte agli schemi di controllo collettivo degli ascensori (un piano)
In uno schema con fermate di passaggio durante l'abbassamento della cabina (Fig. 2, a), le chiamate e gli ordini vengono dati da pulsanti adesivi separati e quindi possono essere registrati in qualsiasi momento e trasmessi immediatamente allo schema, ad eccezione del periodo di movimento del cabina con passeggeri in salita quando il bus di alimentazione delle chiamate dei contatti di trasferimento al circuito executive viene disinserito dai contatti selettivi dal bus positivo.
Nello schema di controllo selettivo completo (Fig. 2, b) sono presenti anche circuiti di suoneria per le cabine di imbarco (ШДВв) e di discesa (ШДВн), i contatti dei relè di blocco RBV e RBN sono collegati ai contatti del circuito esecutivo del circuito selettivo .
Negli schemi riportati nelle Figg. 1 e 2, in assenza di cabina al piano, vengono eccitate le bobine del sensore induttivo ID e del relè RIS. Pertanto, quando si preme il pulsante di comando comando o si chiama KV (sono tenuti in stato acceso dai magneti di ritenuta UM fino a quando non vengono superati dai contatti delle porte della miniera su questo piano del DSh), si forma un circuito (non mostrato in figura) che comprende il relè di comando salita RUV se il piano di destinazione è più alto del piano del parcheggio, oppure il relè di comando discesa LVL se il piano di destinazione è sotto il parcheggio.
Dopo l'arrivo della cabina al piano di chiamata, l'ID del sensore induttivo viene ventilato, il relè RIS viene spento, aprendo i suoi contatti, che spegne il relè RUV o RUN e la lampada LS (la cabina si ferma), e chiudendo il contatto RIS4 si predispone un circuito per l'esecuzione dell'ordine proveniente dalla cabina.
Nel circuito collettivo completo, il circuito diviso dai contatti RIS1 e RIS2 sul pavimento del parcheggio dell'auto è interrotto non solo da questi contatti, ma anche dai contatti del relè di blocco up RBV o down RBN (le loro bobine non sono mostrati nel diagramma) e i circuiti di sollevamento, abbassamento e ordinamento sono separati l'uno dall'altro separando i diodi D1 - D4.
Prima di premere il pulsante di chiamata o di ordine, se non è stato ancora selezionato il senso di marcia del veicolo, vengono chiusi tutti i contatti del circuito di selezione del senso di marcia, ad eccezione dei contatti RIS4 al piano parcheggio.Pertanto, quando uno di questi pulsanti viene premuto, i segnali di chiamata dai piani posti sopra il piano del parcheggio sono collegati alla bobina del relè RUN, ei segnali di chiamata dai piani sottostanti al parcheggio comprendono il relè RUV. Dopo aver selezionato la direzione, contemporaneamente al relè RUV o LVL, si accende uno dei relè di blocco della direzione opposta RBV o RBN, che interrompe l'uscita attraverso il circuito sezionale di segnali di chiamata non transitori con i suoi contatti.
Nello schema riportato in fig. 2, a, per far calare i passeggeri, la cabina va senza sosta al piano più alto della conversazione e poi scende con fermate di passaggio, e nello schema di fig. 2, b, se è necessario far salire i passeggeri, la cabina va al piano più basso dello scalo, quindi sale con fermate di passaggio.
Negli schemi considerati, i selettori sono realizzati su elementi relè. Insieme a questo vengono utilizzati altri selettori: camma, fotoelettrico, inseguimento continuo della spazzola, a gradini, su elementi statici, ecc.
Con grandi flussi di passeggeri, in un corridoio vengono installati diversi ascensori, che hanno un controllo combinato in coppia o in gruppo per aumentare il comfort e migliorare la potenza. Il numero di ascensori collegati in gruppi di solito non supera i quattro, ma più spesso tre, sebbene siano noti sistemi che contengono fino a otto ascensori in un gruppo.
Nel controllo di gruppo, di solito ci sono tre modalità principali di funzionamento dell'ascensore: picco di salita, picco di discesa e movimento bilanciato in entrambe le direzioni. L'attivazione degli ascensori per l'una o l'altra modalità viene effettuata dal dispatcher o automaticamente tramite l'orologio di programmazione installato per ciascun gruppo di ascensori.
Nei grattacieli, ogni gruppo di ascensori è fissato per servire una certa area di piani, gli altri piani non ne sono serviti. Se nel gruppo sono presenti più ascensori che servono un'area o un edificio basso, per aumentare la velocità media di movimento riducendo il numero di fermate, è possibile assegnare ascensori separati per servire i piani pari e dispari.
Per effettuare il controllo doppio o di gruppo degli ascensori, i loro circuiti di controllo devono essere collettivi e le chiamate a ciascun piano in entrambe le direzioni devono essere registrate separatamente in ciascuna direzione da opportuni dispositivi di memorizzazione contenenti relè, transistor, ecc.
Come esempio che riflette le specifiche di funzionamento nel controllo accoppiato di ascensori con relè di parcheggio aggiuntivi del primo ascensore 1PC e del secondo ascensore 2PC, si consideri un frammento del diagramma schematico mostrato in fig. 3.
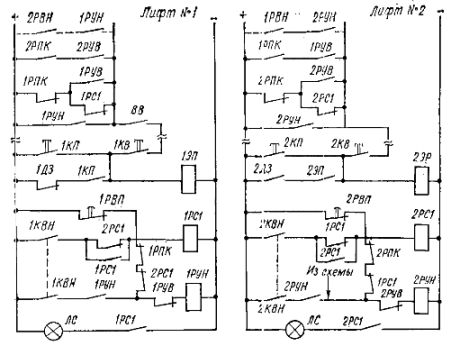
Riso. 3. Frammento di un diagramma schematico del controllo dell'ascensore accoppiato: ER - relè di piano, RPK - relè di commutazione canale, relè di avvio automatico RVP
In questo caso l'auto che è scesa con i passeggeri al primo piano non risponde alle chiamate dagli altri piani e attende i passeggeri. Se non c'è un'auto al primo piano, l'auto che è salita per ordine e viene rilasciata viene automaticamente inviata al primo piano, e quando un'altra macchina viene abbassata o parcheggiata, l'ultima rimane sul pavimento alla fine del volo o va al centro di carico e viene utilizzato per operazioni di chiamata principalmente nella direzione di affondamento.
Il relè di parcheggio della cabina del primo piano 1PC1 o 2PC1 viene attivato dopo l'arrivo della cabina del primo piano dal finecorsa 1KVN o 2KVN (installato nelle miniere di fotocopiatrici). Questi relè sono bloccati.Pertanto, l'inclusione di uno di essi indica che questa vettura è arrivata al primo piano prima dell'altra. In questo caso il relè 1PC1 o 2PC1 con il suo contatto di chiusura accende la lampada di segnalazione LS e con il suo contatto di apertura interrompe il circuito di suoneria del suo ascensore, interrompendo la chiamata mentre la cabina è in sosta al primo piano.
Quando la cabina lascia il primo piano, la sua lampada di segnalazione LS si spegne, l'alimentazione ai circuiti chiamati di questo ascensore viene ripristinata immediatamente dopo che la cabina è stata rilasciata e dopo che la cabina di un altro ascensore arriva al primo piano, il suo relè del computer è acceso. Questa cabina rimane al piano terra e attende i passeggeri (segnalata dall'accensione della spia LS). Quando la cabina che si è messa in ordine viene liberata e non ci sono chiamate, viene inviato un segnale al circuito che accende le bobine del relè 1RUN o 2RUV 1RUN o 2RUV attraverso i contatti di apertura del finecorsa 1KVN o 2KVN, e la cabina va al primo piano, e t .n.
L'apparecchiatura di controllo del motore dei tipici ascensori di controllo singoli, doppi e di gruppo si trova solitamente su tipici pannelli, stazioni o unità di controllo installate nelle sale macchine.