Classificazione dei sistemi di controllo automatico

L'insieme del dispositivo di controllo automatico e dell'oggetto di controllo collegati e che interagiscono tra loro secondo l'algoritmo di controllo è chiamato sistema di controllo automatico (ACS).
I sistemi di controllo automatico possono essere classificati in base al metodo di controllo e alle caratteristiche funzionali. Secondo il metodo di controllo, tutti i sistemi sono divisi in due grandi classi: ordinari (non autoregolanti) e autoregolanti (adattivi).
I sistemi ordinari appartenenti alla categoria semplice non mutano la loro struttura nel corso della gestione. Sono i più sviluppati e ampiamente utilizzati nelle fonderie e nelle officine termiche. I comuni sistemi di controllo automatico sono divisi in tre sottoclassi: sistemi di controllo aperti, chiusi e combinati.
I sistemi di controllo automatico ad anello aperto, a loro volta, sono suddivisi in sistemi di controllo automatico rigido (SZHU) e sistemi di controllo dei disturbi.
Nei primi sistemi il regolatore agisce sull'oggetto di controllo indipendentemente dal risultato ottenuto, cioè dal valore della variabile controllata e dal disturbo esterno. I sistemi di controllo dei disturbi funzionano in base al principio che l'azione di controllo viene generata in base ai disturbi esterni che interessano l'oggetto di controllo.
Si consideri, ad esempio, l'impianto di riscaldamento di una fonderia o di un'officina termica. In questo caso il consumo di acqua calda nella tubazione di riscaldamento del bollitore dipende dalle condizioni climatiche esterne. Più fa freddo fuori, più acqua calda viene fornita ai radiatori e viceversa.
I sistemi di controllo automatico chiuso che funzionano secondo il principio della deflessione sono anche chiamati sistemi di controllo automatico (ACS). La loro caratteristica distintiva è la presenza di un ciclo chiuso di passaggio del segnale, cioè la presenza di un canale di ritorno attraverso il quale viene trasmessa all'ingresso dell'elemento di confronto l'informazione sullo stato della variabile controllata.
I sistemi di controllo automatico sono progettati per risolvere tre problemi: stabilizzazione del valore controllato (stabilizzazione ATS), modifica del valore controllato secondo programmi noti (ATS programmati) o sconosciuti (tracking ATS).
Nella stabilizzazione ATS, il setpoint della variabile controllata è costante. Un esempio di tale sistema è il sistema di controllo della temperatura nello spazio di lavoro di un forno termico. Nel software ATS, il valore della variabile controllata cambia nel tempo secondo un programma (noto) pre-progettato.
Nei servosistemi, il valore impostato della variabile controllata cambia nel tempo secondo un programma precedentemente sconosciuto.Gli ATS di tracciamento e software differiscono dagli stabilizzatori nel principio dell'elaborazione del segnale di riferimento.
L'esempio più tipico di servocomando è il mantenimento automatico di un determinato rapporto tra il consumo di combustibile e di aria durante la regolazione del processo di combustione nei forni per la fusione e il riscaldamento del combustibile.
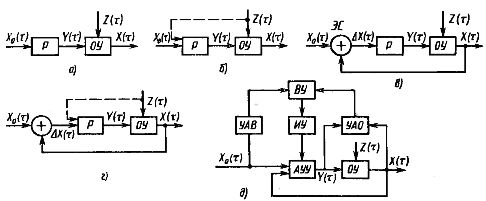
Sistemi di controllo automatici: a - aperto, b - polarizzato aperto, c - chiuso, d - combinato, d - autoregolante, P - controller, OU - oggetto di controllo, ES - elemento di confronto, UAV - dispositivo per l'analisi dell'azione di controllo : VU — dispositivo informatico, IU è un dispositivo esecutivo, AUU è un dispositivo di controllo automatico, AUO è un dispositivo di analisi degli oggetti di controllo.
I sistemi combinati combinano i vantaggi dei sistemi di controllo della deviazione e dei disturbi, il che aumenta la precisione del controllo. L'effetto di disturbi non contabilizzati nei sistemi combinati è compensato o attenuato dal controllo del bias.
I sistemi autoregolanti (adattivi) possono essere suddivisi in tre sottoclassi: sistemi estremi, sistemi autoregolanti e sistemi autoregolanti.
I sistemi di regolazione estremi sono chiamati sistemi di stabilizzazione, tracciamento o controllo programmato in cui l'impostazione, il programma o la legge di riproduzione cambiano automaticamente a seconda dei cambiamenti nelle condizioni esterne o dello stato interno del sistema per creare la modalità di funzionamento più favorevole (ottimale) di un oggetto di controllo.
In tali sistemi, invece di un'impostazione o di un programma permanente, viene installato un dispositivo di ricerca automatica, che analizza ogni caratteristica dell'oggetto (efficienza, produttività, economia, ecc.) e, a seconda del risultato ottenuto, fornisce il valore richiesto di un variabile controllata al dispositivo di controllo, in modo che questa caratteristica abbia un valore eccezionale con un cambiamento continuo in varie influenze di disturbo che influenzano le condizioni operative del sistema.
Nei sistemi con parametri di autotaratura, quando cambiano le condizioni esterne o le caratteristiche dell'oggetto controllato, si verifica un cambiamento automatico (non secondo un programma prestabilito) dei parametri variabili del dispositivo di controllo per garantire un funzionamento stabile del sistema e mantenere il valore controllato a un livello dato o ottimale.
Nei sistemi con una struttura autoregolante, quando cambiano le condizioni esterne e le caratteristiche dell'oggetto di controllo, gli elementi nello schema di connessione vengono scambiati o vengono introdotti nuovi elementi. Lo scopo di questi cambiamenti (scelta) della struttura è quello di raggiungere una migliore soluzione al problema di gestione.
La selezione della struttura avviene tramite ricerca automatica utilizzando operazioni computazionali e logiche. Tali sistemi non devono solo adattarsi a tutti i cambiamenti delle condizioni esterne e delle caratteristiche dell'oggetto, ma anche funzionare normalmente anche in presenza di malfunzionamenti o danni ai singoli elementi, creando nuovi circuiti per sostituire quelli rotti. I sistemi di autoregolazione possono essere realizzati per migliorare, "acquisire esperienza" provando rapidamente diverse opzioni, scegliendo e "ricordando" quella migliore.
Classificazione funzionale tutti i sistemi di controllo automatico sono suddivisi in quattro classi:
-
sistemi per coordinare il lavoro dei meccanismi,
-
sistemi di regolazione dei parametri dei processi tecnologici,
-
sistemi di controllo automatico,
-
sistemi automatici di protezione e blocco.

Sistemi progettati per coordinare il funzionamento dei singoli meccanismi dell'impianto o dell'impianto nel suo complesso sistemi di controllo rigidi automatici (SZHU).
I processi tecnologici dei sistemi di controllo automatico (ACS) assicurano il mantenimento del valore controllato a un determinato livello o la sua modifica secondo un determinato programma.
I sistemi di controllo automatico (ACS) contengono mezzi e metodi per ottenere informazioni sui valori correnti dei parametri di processo tecnologico (temperatura, pressione, polverosità o contenuto di gas nell'aria, ecc.) senza il diretto coinvolgimento umano.
I sistemi di protezione automatica (SAZ) e i sistemi di blocco (SAB) impediscono il verificarsi di situazioni di emergenza quando si utilizzano apparecchiature in uno stato stabile.