Circuiti di controllo automatico per l'avviamento e l'arresto di motori DC
 L'avviamento di qualsiasi motore è accompagnato da determinati interruttori nel circuito di potenza e nel circuito di controllo. In questo caso vengono utilizzati relè-contattore e dispositivi senza contatto. Per motori DC da limitare correnti di partenza i resistori di avviamento sono inclusi nel circuito del rotore e dell'indotto dei motori, che vengono spenti quando i motori vengono accelerati gradualmente. Al termine dell'avvio, le resistenze di avvio vengono completamente bypassate.
L'avviamento di qualsiasi motore è accompagnato da determinati interruttori nel circuito di potenza e nel circuito di controllo. In questo caso vengono utilizzati relè-contattore e dispositivi senza contatto. Per motori DC da limitare correnti di partenza i resistori di avviamento sono inclusi nel circuito del rotore e dell'indotto dei motori, che vengono spenti quando i motori vengono accelerati gradualmente. Al termine dell'avvio, le resistenze di avvio vengono completamente bypassate.
Anche il processo di frenatura dei motori può essere automatizzato. Dopo il comando di arresto, con l'ausilio dell'apparecchiatura relè-contattore, vengono effettuati gli interruttori necessari nei circuiti di potenza. Quando ci si avvicina a una velocità prossima allo zero, il motore viene disconnesso dalla rete. Durante l'avvio, i passaggi vengono disattivati a intervalli regolari o in base ad altri parametri. Questo cambia la corrente e la velocità del motore.
Il controllo dell'avviamento del motore viene eseguito in funzione di EMF (o velocità), corrente, tempo e percorso.
Tipici sottoinsiemi e circuiti per il controllo automatico dell'avviamento di motori DC
L'avviamento di un motore CC con eccitazione parallela o indipendente viene effettuato con un resistore introdotto nel circuito dell'indotto. È necessario un resistore per limitare la corrente di spunto. Quando il motore accelera, la resistenza di avviamento viene aumentata. Terminato l'avviamento, la resistenza sarà completamente bypassata e il motore tornerà alle sue naturali caratteristiche meccaniche (Fig. 1). All'avvio, il motore accelera secondo la caratteristica artificiale 1, poi 2, e dopo aver manovrato il resistore - secondo la caratteristica naturale 3.
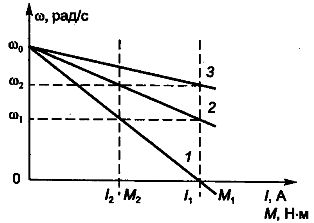
Riso. 1. Caratteristiche meccaniche ed elettromeccaniche di un motore CC con eccitazione parallela (ω - velocità angolare di rotazione; I1 M1 - corrente di picco e coppia del motore; I2 M2 - corrente e momento di commutazione)
Considera il nodo del circuito di avviamento del motore CC (DCM) nella funzione EMF (Fig. 2).
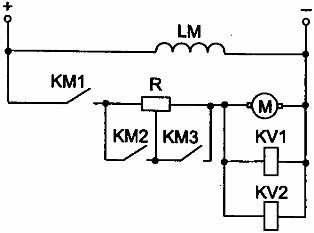
Riso. 2. Il nodo del circuito iniziale di DCT di eccitazione parallela nella funzione EMF
La funzione EMF (o velocità) è controllata da relè, tensioni e contattori. I relè di tensione sono configurati per funzionare a diversi valori di fem di armatura. Quando il contattore KM1 è acceso, la tensione del relè KV al momento dell'avvio non è sufficiente per il funzionamento. Quando il motore accelera (a causa dell'aumento della fem del motore), viene attivato il relè KV1, quindi KV2 (le tensioni di attivazione del relè hanno valori corrispondenti); includono i contattori di accelerazione KM2, KMZ e i resistori nel circuito di armatura sono shuntati (i circuiti di commutazione del contattore non sono mostrati nello schema; LM è l'avvolgimento di eccitazione).
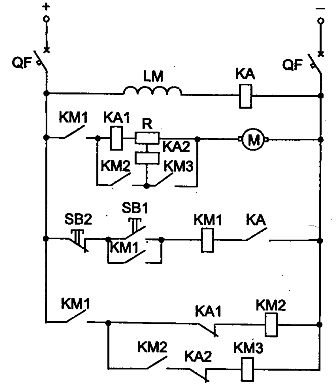
Diamo un'occhiata allo schema per avviare un motore CC nella funzione EMF (Fig. 3). La velocità angolare del motore è spesso fissata indirettamente, cioèmisurare grandezze legate alla velocità. Per un motore CC, tale valore è l'EMF. L'avvio viene eseguito come segue. L'interruttore automatico QF si accende, il campo del motore è collegato all'alimentazione. Il relè KA si attiva e chiude il suo contatto.
I restanti dispositivi del circuito rimangono nella loro posizione originale. Per avviare il motore, devi premi il bottone SB1 «Start», dopo di che il contattore KM1 viene attivato e collega il motore alla fonte di alimentazione. Il contattore KM1 è autoalimentato Il motore in corrente continua viene accelerato con la resistenza di armatura del motore R.
All'aumentare della velocità del motore, aumentano la sua fem e la tensione nelle bobine dei relè KV1 e KV2. Alla velocità ω1 (vedi Fig. 1.) viene attivato il relè KV1. Chiude il suo contatto nel circuito del contattore KM2, che fa scattare e cortocircuita il primo stadio della resistenza di avviamento con il suo contatto. Alla velocità ω2 il relè KV2 è eccitato. Con il suo contatto chiude il circuito di alimentazione del teleruttore KMZ che, se azionato, con un contatto, cortocircuita il secondo stadio di avviamento della resistenza di avviamento. Il motore raggiunge le sue caratteristiche meccaniche naturali e termina il decollo.
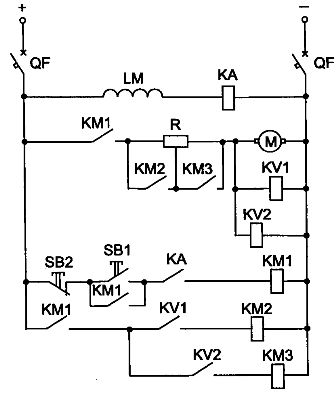
Riso. 3. Schema dell'avvio della DCT dell'eccitazione parallela nella funzione EMF
Per il corretto funzionamento del circuito, è necessario impostare il relè di tensione KV1 per funzionare alla FEM corrispondente alla velocità ω1 e il relè KV2 per funzionare alla velocità ω2.
Per arrestare il motore, premere il pulsante Stop SB2. Per disconnettere il circuito elettrico, aprire l'interruttore QF.
La funzione corrente è controllata da un relè di corrente. Considera il nodo del circuito di avviamento del motore CC nella funzione di flusso. Nello schema riportato in fig.4 vengono utilizzati relè di massima corrente, che si attivano alla corrente di spunto I1 e si diseccitano alla corrente minima I2 (vedi Fig. 1). Il tempo di risposta interno dei relè di corrente deve essere inferiore al tempo di risposta del contattore.
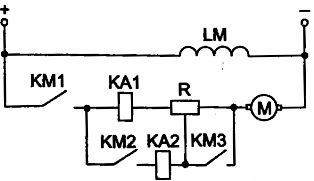
Riso. 4. Il nodo del circuito di avviamento dell'eccitazione parallela DCT a seconda della corrente
L'accelerazione del motore inizia con il resistore completamente inserito nel circuito dell'indotto. Man mano che il motore accelera la corrente diminuisce, con la corrente I2 il relè KA1 scompare e con il suo contatto chiude il circuito di alimentazione del contattore KM2, che con il suo contatto bypassa il primo contatto della resistenza di avviamento. Allo stesso modo, il secondo stadio di avviamento del resistore è cortocircuitato (relè KA2, contattore KMZ). I circuiti di alimentazione del contattore non sono mostrati nello schema. Al termine dell'avviamento del motore, la resistenza nel circuito dell'indotto verrà ponticellata.
Considera il circuito per l'avviamento di un motore CC come funzione di flusso (Fig. 5). Le resistenze dei gradini del resistore sono selezionate in modo tale che nel momento in cui il motore viene acceso e i gradini vengono deviati, la corrente I1 nel circuito dell'indotto e il momento M1 non superino il livello consentito.
Avviamento di un motore a corrente continua viene eseguito accendendo l'interruttore QF e premendo il pulsante «Start» SB1. In questo caso il contattore KM1 si attiva e chiude i suoi contatti. La corrente di spunto I1 passa attraverso il circuito di potenza del motore, sotto l'influenza del quale viene attivato il relè di sovracorrente KA1. Il suo contatto si apre e il contattore KM2 non riceve alimentazione.
Riso. 5. Schema dell'avviamento DCT ad eccitazione parallela in funzione della corrente
Quando la corrente scende al valore minimo I2, il relè di massima corrente KA1 si abbassa e chiude il suo contatto.Il contattore KM2 è attivato e tramite il suo contatto principale mette in derivazione la prima sezione della resistenza di avviamento e il relè KA1. Durante la commutazione, la corrente sale al valore I1.
Quando la corrente risale al valore di I1, il contattore KM1 non si accende, perché la sua bobina è bypassata dal contatto KM2. Sotto l'influenza della corrente I1, il relè KA2 viene attivato e apre il suo contatto. Quando nel processo di accelerazione la corrente scende nuovamente al valore di I2, il relè KA2 si abbassa e il contattore KMZ si accende. L'avviamento è completo, il motore funziona con le sue caratteristiche meccaniche naturali.
Per il corretto funzionamento del circuito è necessario che il tempo di risposta dei relè KA1 e KA2 sia inferiore al tempo di risposta dei contattori. Per arrestare il motore, premere il pulsante «Stop» SB2 e spegnere l'interruttore automatico QF per scollegare il circuito.
Il controllo del tempo viene eseguito utilizzando un relè temporizzato e corrispondenti contattori che cortocircuitano gli stadi del resistore con i loro contatti.
Si consideri il nodo del circuito di avviamento motore in corrente continua in funzione del tempo (Fig. 6) Il relè temporizzatore KT si attiva immediatamente quando appare tensione nel circuito di comando attraverso il contatto di apertura KM1. Dopo l'apertura del contatto KM1, il relè a tempo KT perde l'alimentazione e chiude il suo contatto con un ritardo. Il contattore KM2 dopo un intervallo di tempo pari al ritardo del temporizzatore riceve alimentazione, chiude il suo contatto e devia la resistenza nel circuito dell'indotto.
Riso. 6. Il nodo del circuito di avviamento DCT dell'eccitazione parallela in funzione del tempo
I vantaggi del controllo in funzione del tempo includono facilità di controllo, stabilità del processo di accelerazione e decelerazione, mancanza di ritardo dell'azionamento elettrico a velocità intermedie.
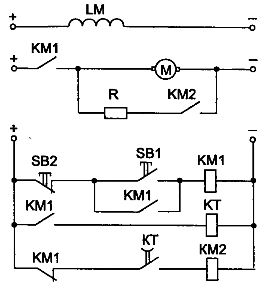
Si consideri il circuito per avviare l'eccitazione parallela di un motore CC in funzione del tempo. Nella fig. 7 mostra uno schema di un motore DC ad eccitazione parallela ad avviamento irreversibile. Il lancio avviene in due fasi. Il circuito utilizza i pulsanti SB1 «Start» e SB2 «Stop», contattori KM1 ... KMZ, relè temporizzati elettromagnetici KT1, KT2. L'interruttore QF si accende. In questo caso, la bobina del relè temporale KT1 riceve alimentazione e apre il suo contatto nel circuito del contattore KM2. Il motore viene avviato premendo il pulsante «Start» SB1. Il contattore KM1 riceve alimentazione e con il suo contatto principale collega il motore a una fonte di alimentazione con un resistore nel circuito dell'indotto.
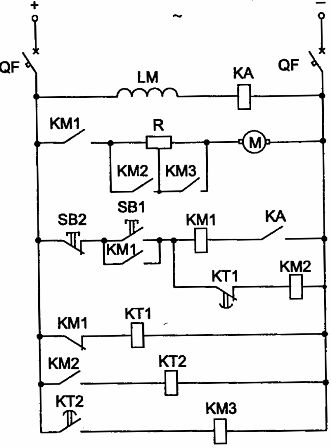
Riso. 7. Schema di avviamento irreversibile di un motore DC in funzione del tempo
Il relè di minima corrente KA serve a proteggere il motore dall'interruzione del circuito di eccitazione. Durante il normale funzionamento, il relè KA si eccita e il suo contatto nel circuito del contattore KM1 si chiude, preparando il contattore KM1 al funzionamento. Quando il circuito di eccitazione viene interrotto, il relè KA si spegne, apre il suo contatto, quindi il contattore KM1 si spegne e il motore si ferma. Quando viene azionato il contattore KM1, il suo contatto di blocco si chiude e il contatto KM1 nel circuito relè KT1 si apre, che si spegne e chiude il suo contatto con un ritardo.
Dopo un intervallo di tempo pari al ritardo temporale del relè KT1, viene chiuso il circuito di alimentazione del contattore di accelerazione KM2, che viene attivato e con il suo contatto principale cortocircuita uno stadio della resistenza di avviamento. Allo stesso tempo, il relè orario KT2 è eccitato. Il motore accelera. Dopo un intervallo di tempo pari al ritardo del relè KT2, il contatto KT2 si chiude, il contattore di accelerazione KMZ viene attivato e con il suo contatto principale contatta il secondo stadio della resistenza di avviamento nel circuito di armatura. L'avviamento è completo e il motore ritorna alle sue naturali caratteristiche meccaniche.
Tipiche unità del circuito di controllo del freno CC
I sistemi di controllo automatico del motore CC utilizzano la frenatura dinamica, la frenata opposta e la frenata rigenerativa.
Nella frenatura dinamica è necessario chiudere l'avvolgimento di indotto del motore ad una resistenza aggiuntiva e lasciare eccitato l'avvolgimento di eccitazione. Questa frenata può essere effettuata in funzione della velocità e in funzione del tempo.
Il controllo in funzione della velocità (EMF) durante la frenata dinamica può essere effettuato secondo lo schema mostrato in fig. 8. Quando il contattore KM1 è spento, l'armatura del motore è scollegata dalla rete, ma al momento della disconnessione è presente tensione sui suoi terminali. Il relè di tensione KV opera e chiude il suo contatto nel circuito del contattore KM2, che con il suo contatto chiude l'armatura del motore al resistore R.
A velocità prossime allo zero, il relè KV perde potenza. Un'ulteriore decelerazione dalla velocità minima all'arresto completo avviene sotto l'azione di un momento di resistenza statico.Per aumentare l'efficienza della frenata, è possibile applicare due o tre stadi di frenata.
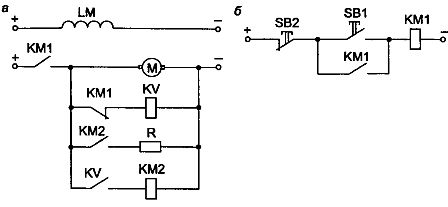
Riso. 8. Nodo del circuito per il controllo automatico della frenatura dinamica nella funzione EMF: a - circuito di potenza; b — circuito di controllo
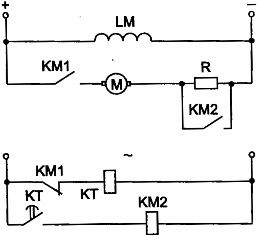
L'eccitazione costante indipendente dal motore della frenatura dinamica in funzione del tempo viene eseguita secondo lo schema mostrato in fig. nove.
Riso. 9. Nodo del circuito di frenatura dinamica DCT di eccitazione indipendente in funzione del tempo
Quando il motore è in funzione, il relè orario KT è attivo, ma il circuito del contattore del freno KM2 è aperto. Per interrompere è necessario premere il pulsante "Stop" SB2. Il contattore KM1 e il temporizzatore KT perdono tensione; il contattore KM2 è attivato perché il contatto KM1 nel circuito del contattore KM2 si chiude e il contatto del relè a tempo KT si apre con un ritardo.
Per la temporizzazione del relè temporale, il contattore KM2 riceve alimentazione, chiude il suo contatto e collega l'armatura del motore alla resistenza aggiuntiva R. Viene eseguito un arresto dinamico del motore. Al suo termine il relè KT, dopo un po' di tempo, apre il suo contatto e disconnette il teleruttore KM2 dalla rete. L'ulteriore frenata fino all'arresto completo viene eseguita sotto l'influenza del momento di resistenza Ms.
Nella frenatura ad azione inversa, la forza elettromotrice del motore e la tensione di rete agiscono in accordo. Per limitare la corrente, viene inserito un resistore nel circuito.
Controllo dell'eccitazione dei motori DC
L'avvolgimento di campo del motore ha un'induttanza significativa e se il motore viene spento rapidamente, potrebbe apparire una tensione elevata su di esso, che causerà la rottura dell'isolamento dell'avvolgimento. Per evitare ciò, è possibile utilizzare i nodi del circuito mostrati in fig.10. La resistenza di spegnimento viene attivata in parallelo con la bobina di eccitazione attraverso il diodo (Fig. 10, b). Pertanto, dopo lo spegnimento, la corrente passa brevemente attraverso la resistenza (Fig. 10, a).

Riso. 10. Nodi dei circuiti per l'accensione delle resistenze di spegnimento: a - la resistenza di spegnimento è collegata in parallelo; b - la resistenza di spegnimento è accesa attraverso il diodo.
La protezione contro l'interruzione del circuito di eccitazione viene effettuata utilizzando un relè di minima corrente secondo lo schema mostrato in fig. undici.

Riso. 11. Protezione contro l'interruzione del circuito di eccitazione: a - circuito di eccitazione di potenza; b — circuito di controllo
In caso di interruzione della bobina di eccitazione, il relè KA si diseccita e disconnette il circuito del contattore KM.