Circuiti di controllo del motore in funzione della velocità
 Nel controllo del motore, la velocità viene monitorata in funzione della velocità del rotore del motore per influenzare gli elementi di controllo corrispondenti mentre cambia.
Nel controllo del motore, la velocità viene monitorata in funzione della velocità del rotore del motore per influenzare gli elementi di controllo corrispondenti mentre cambia.
Relè di controllo della velocità o piccoli generatori elettrici di misurazione possono essere utilizzati nei circuiti di controllo dell'avviamento del motore. Tuttavia, vengono utilizzati molto raramente per questi scopi a causa della complessità del design, dei costi elevati e dell'affidabilità insufficiente. Pertanto, la velocità del motore è controllata con metodi indiretti. Nei motori asincroni e sincroni, la frequenza di rotazione è controllata dalla fem e dalla frequenza della corrente del rotore e nei motori a corrente continua dalla fem dell'indotto.
Nella fig. 1, a e b mostrano schemi per l'avvio automatico di un motore CC ad eccitazione parallela in base alla frequenza di rotazione e in base all'EMF e alla tensione di armatura dal momento dell'avvio. Il controllo della frequenza di rotazione viene effettuato misurando la FEM del motore, che varia in proporzione alla frequenza di rotazione.
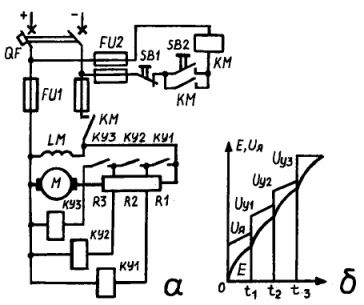
Riso. 1.Circuiti di controllo in funzione della velocità: a e b — circuito e schema di avviamento di un motore CC ad eccitazione parallela
Poiché l'EMF è proporzionale alla velocità del motore, l'ingresso automatico dei singoli stadi del reostato di avviamento viene effettuato a una certa grandezza della tensione di attivazione dei contattori di accelerazione KM1, KM2 e KMZ, ciascuno dei quali è impostato su una certa retrazione valore. Premendo lo starter pulsanti SB2 attiva il contattore della linea KM. Tutte le resistenze R1, R2, R3 saranno collegate in serie con l'avvolgimento dell'indotto e limiteranno la corrente.
Ad una certa velocità n1, la tensione Uy1 della bobina del contattore K1 è

dove Qui Questo è il coefficiente della macchina.
Quando Uy1 sarà uguale alla tensione di pull-down, il contattore KM1 entrerà in funzione e cortocircuiterà la resistenza R1. Un ulteriore aumento della velocità di rotazione fino alla rotazione di n2 e n3 comporterà un aumento della tensione sulle bobine dei teleruttori K2 e un cortocircuito a valori


In questo caso i contattori K2 e il cortocircuito lavoreranno in serie e cortocircuiteranno le resistenze R2 e R3. Dopo aver cortocircuitato la resistenza R3, il processo di avviamento sarà completato e il motore potrà funzionare a lungo.
L'EMF nel circuito del rotore del motore a induzione è proporzionale allo scorrimento, ovvero E2s = E2s. Qui E2 è la fem di un rotore stazionario.
Minore è lo scorrimento, minore è l'EMF, ovvero maggiore è la velocità del rotore del motore. Per controllare l'avviamento dei motori CA con un rotore avvolto, vengono utilizzati relè che controllano il valore dell'EMF nel circuito del rotore.I dispositivi corrispondenti (relè, contattori) che cortocircuitano le resistenze di avviamento sono adattati a queste tensioni.
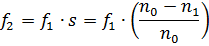
Per il controllo dei motori a induzione a rotore avvolto e dei motori sincroni, il metodo della frequenza può essere utilizzato anche in funzione della velocità. Questo metodo si basa sulla nota dipendenza della frequenza della corrente del rotore f2 dalla frequenza di rotazione del campo dello statore n0 e del rotore n2, ovvero
Poiché ad ogni velocità del rotore corrisponde un certo valore f2, sul circuito della bobina del teleruttore agirà un relè tarato a quella frequenza e collegato al circuito del rotore del motore. Il contattore cortocircuiterà gli stadi di resistenza a una determinata velocità.
La frenatura con motori opposti avviene in base alla velocità relè di controllo della velocità SR. In Fig. 2, a, b mostrano esempi di arresto di motori asincroni per opposizione.
Riso. 2. Schemi di arresto di motori asincroni mediante opposizione: a — irreversibile; b - reversibile
Diamo un'occhiata a come funzionano questi schemi.
Premendo il pulsante SB2 si accende la bobina del contattore KM (vedi Fig. 2, a), che chiude i contatti di potenza e blocca il pulsante SB2. Allo stesso tempo, il contatto del blocco di apertura KM nel circuito della bobina del contattore del freno KM1 e il relè di controllo della velocità SR li disconnette dalla rete. Quando il rotore del motore raggiunge una certa velocità, il contatto SR si chiuderà, ma ciò non provocherà più l'intervento del teleruttore KM1. Il motore continua a funzionare normalmente.
L'arresto del motore con un freno a controcommutazione avviene premendo il pulsante SB.Allo stesso tempo, la bobina del contattore KM viene neutralizzata ei suoi contatti principali scompaiono e disconnettono il motore dalla rete. Il contatto di apertura KM nel circuito del contattore del freno di KM1 si chiuderà. Poiché in questo momento il contatto del relè di controllo della velocità SR è chiuso, i contatti principali del contattore del freno vengono immediatamente accesi e l'avvolgimento dello statore viene invertito, il campo magnetico inizierà a ruotare nella direzione opposta, ad es. la rotazione del rotore e del motore verrà arrestata dalla controcommutazione. La velocità del rotore diminuisce e ad un certo valore piccolo i suoi contatti del relè di controllo della velocità RKS si apriranno e scollegheranno il motore dalla rete.
Nel caso di comando inverso con frenatura opposta (Fig. 2, b), il motore viene avviato in avanti premendo il pulsante SB1 che, chiudendo il circuito della bobina del teleruttore KM1, assicura che il motore sia collegato al rete. Il rotore del motore inizierà a ruotare e quando raggiungerà una certa velocità, il contatto di chiusura SR1 del relè di controllo della velocità si chiuderà e il contatto di apertura SR2 si aprirà.
L'accensione della bobina del contattore KM2 non avverrà perché il contatto di apertura del contattore KM1 ha interrotto il suo circuito. In questa posizione il motore continuerà a girare fino a quando non si preme il pulsante SB. Quando si preme il pulsante SB, il circuito della bobina KM1 viene spento. Ciò chiuderà il contatto di apertura KM1 e il circuito della bobina del contattore KM2 riceverà alimentazione.
L'avvolgimento dello statore del motore si innesterà in retromarcia. Mentre il rotore continua a ruotare nella stessa direzione per inerzia, si verifica la frenata di opposizione.Quando la velocità diminuisce fino a un certo valore piccolo, il relè di controllo della velocità apre il suo contatto SR1, il contattore KM2 si spegnerà e scollegherà il motore dalla rete.
Per avviare il motore in retromarcia, premere il pulsante SB2. L'intero processo sarà simile a quello descritto. Ora il ruolo del contattore del freno è svolto dal contattore KM1 e i contatti SR2 del relè di controllo della velocità controlleranno il processo di frenatura.
L'avviamento automatico di un motore sincrono è associato a ben note difficoltà, poiché in questo caso è necessario non solo limitare la corrente di avviamento, ma anche sincronizzare la macchina con la rete.
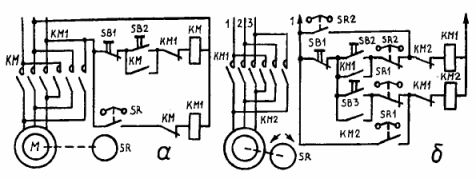
Il circuito di controllo per un motore sincrono a bassa potenza è mostrato in Fig. 3. La limitazione della corrente di spunto è fornita da resistenze attive incluse nell'avvolgimento dello statore. Prima di avviare il motore, accendere gli interruttori automatici di ingresso QF e QF1 della rete AC e DC, che forniscono la protezione massima e termica. Premendo il pulsante di avvio SB2, la bobina del contattore KM viene attivata e l'avvolgimento dello statore del motore sincrono tramite i contatti principali di KM viene collegato alla rete tramite i resistori di avviamento Rn. La bobina è autobloccante e il suo contatto nel circuito DC include il relè di blocco KV, il cui contatto di chiusura, chiudendosi, prepara le bobine dei contattori K1 e K2 per l'accensione.
I relè di frequenza KF1 e KF2 nel circuito di eccitazione del rotore LM funzionano in funzione della velocità del motore All'avviamento, quando lo scorrimento del rotore è massimo, i contatti di apertura dei relè KF1 e KF2 si aprono.L'apertura delle bobine avviene prima che il relè di blocco KV si attivi e la bobina K1 non riceva alimentazione. I contatti del relè KF1 e KF2 si richiudono quando il numero di giri del motore raggiunge approssimativamente il 60-95% in modo sincrono secondo la regolazione del relè.
Dopo aver chiuso i contatti del relè KF1, la bobina del contattore K1 si accenderà, i suoi contatti nel circuito principale cortocircuiteranno le resistenze di avviamento Rp e lo statore si accenderà alla massima tensione di linea. Quando i contatti aperti del relè KF2 sono chiusi, viene creato un circuito per alimentare la bobina del contattore K2, indipendentemente dal contattore K1, il suo contatto si apre ad una velocità di circa il 60% della velocità sincrona.
Il contattore K2 ha due avvolgimenti: uno principale, tirando KM1 e il secondo avvolgimento KM2, progettato per sbloccare il blocco, fornito con il contattore. Dopo aver acceso la bobina di avvolgimento KM1, i contatti di chiusura K2 si chiudono nel circuito di eccitazione e i contatti di apertura K2 si aprono, scollegando l'avvolgimento del rotore dai resistori di scarica R1 e R2 e collegando il rotore alla rete CC.
Riso. 3. Schema di controllo del motore sincrono
I contatti del contattore K2 funzionano nel seguente ordine. Il contatto NA K2 si apre nel circuito di alimentazione della bobina di pickup, ma l'azione di blocco mantiene il contattore eccitato. I contatti di chiusura K2 si chiudono nel circuito di alimentazione delle due bobine e nel circuito della bobina KM2, predisponendo il circuito alla successiva accensione. La bobina K2 verrà diseccitata non appena il meccanismo di blocco viene rilasciato dalla bobina KM2. Il motore viene scollegato dalla rete premendo il pulsante SB1.La bobina K1 rilascia il suo contatto di apertura nel circuito della bobina KM2, che rilascia il fermo e spegne la bobina KM1, dopodiché il circuito ritorna nella sua posizione originale.